

Six-rotor aircraft attitude decoupling control method
A technology of decoupling control and aircraft, applied in the field of aircraft control, can solve the problems of difficult to obtain dynamic characteristics of disturbances and easy to be affected by disturbances, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0123]This example provides a hexacopter attitude decoupling control method, including:
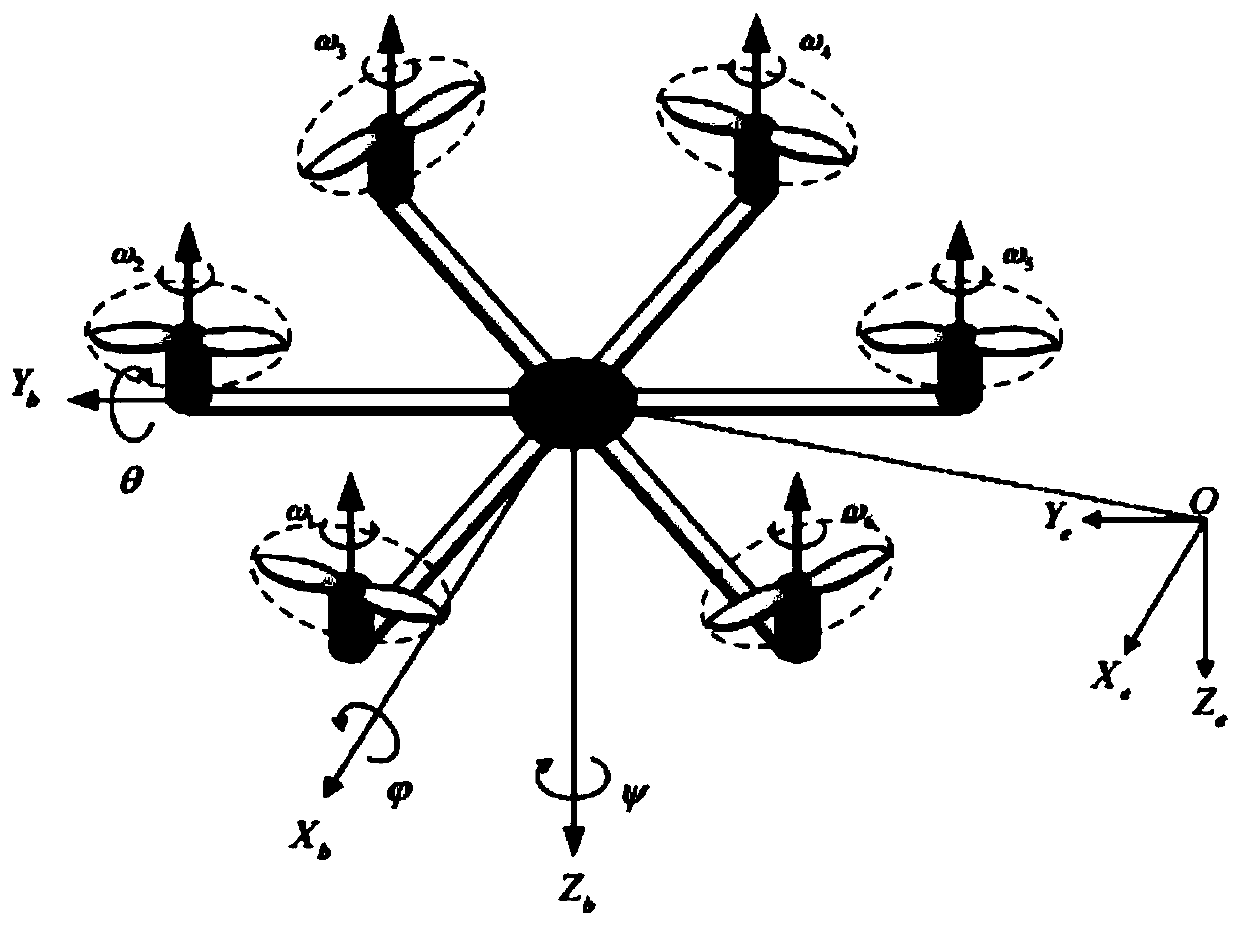
[0124] (1) Select the navigation coordinate system OX e Y e Z e , body coordinate system OX b Y b Z b and the aircraft attitude angle vector Establish a dynamic model of a hexacopter;
[0125] (2) Select the input of the flight system, ignore the air resistance, the coupling of the three channels and the gyro effect moment, and simplify the aircraft dynamics model;
[0126] (3) Consider the external disturbance term and coupling disturbance term in each loop as the output disturbance added to the loop, and design a disturbance compensator;
[0127] (4) Compensate with a disturbance compensator to realize the decoupling and disturbance compensation of the aircraft attitude system.
[0128] In step (2), air resistance, three-channel coupling and gyroscopic torque are ignored.
[0129] In step (4), using the disturbance compensator to perform compensation refers to using the distur...
Embodiment 2
[0143] This example compares the aircraft attitude control based on the cascade PID and the disturbance compensator based on the simulation experiment.
[0144] Simulation test:
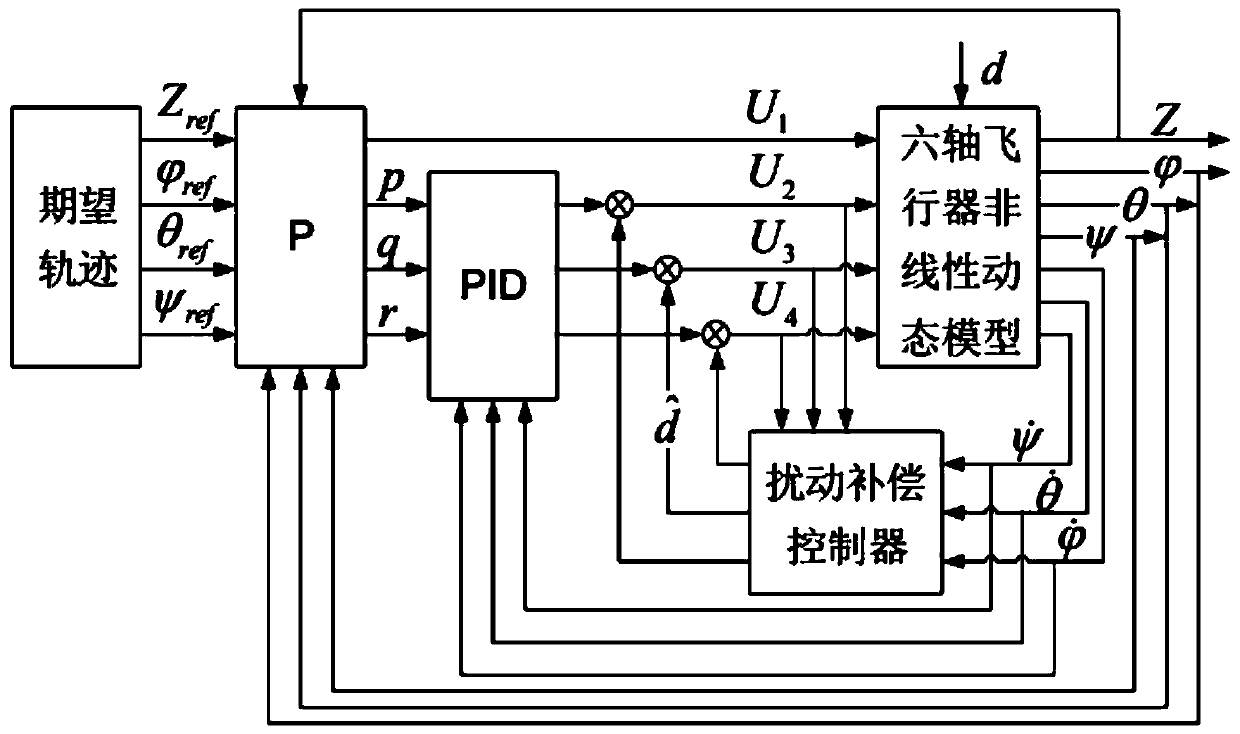
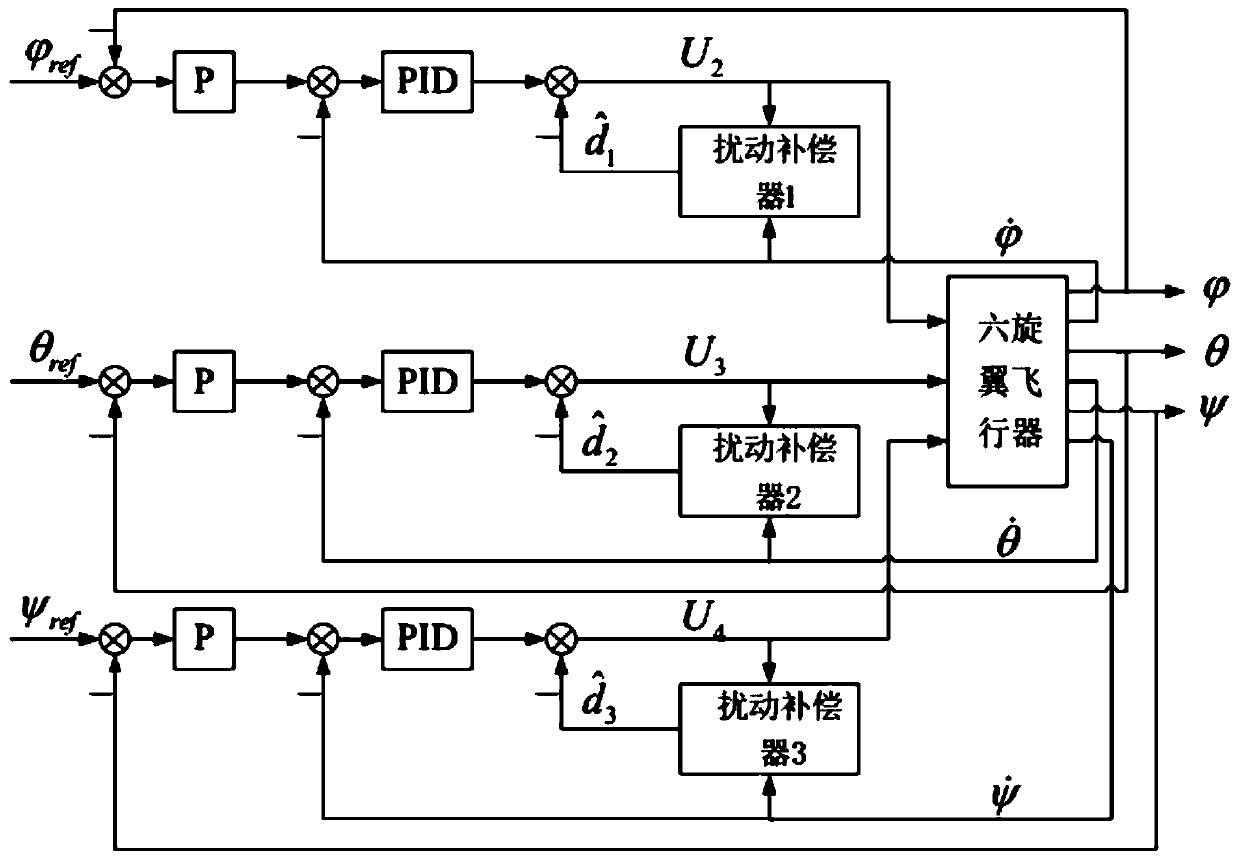
[0145] In the Simulink software, the simulation block diagrams of attitude control based on cascaded PID and attitude decoupling control based on disturbance compensator for the hexacopter were built respectively, see Figure 6 and Figure 7 .
[0146] Attitude control simulation parameters based on cascade PID: the inner loop PID controller parameter value of roll angle and pitch angle channel is K p = 6,K i = 2,K p =0.01, the value of the outer loop proportional controller is K=5; the parameter value of the inner loop PID controller of the yaw angle channel is K p =2.7,K i = 1,K p =0.01, the value of the outer loop proportional controller is K=10.
[0147] Attitude decoupling control simulation parameters based on disturbance compensator: the filter parameters of the three channels of roll ...
Embodiment 3
[0170] In this example, an attitude control experiment is carried out on a self-built six-rotor aircraft platform to further verify the disturbance suppression performance of the six-rotor aircraft attitude decoupling control method in Embodiment 1 of the present invention. In the experiment, the three attitude angles of the hexacopter need to be controlled separately, so the single-channel mooring experiment method is adopted. The main purpose of the single-channel tethered experiment is to conduct an angle control experiment on the remaining channel under the premise of restricting the degrees of freedom of other channels.
[0171] The attitude roll (pitch) angle control experiment of the six-rotor aircraft was carried out on the experimental platform built, and the attitude control methods based on the disturbance compensator and the cascade PID were used respectively. In the experiment, the remote control was used to control the attitude of the aircraft, and the attitude in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More