

Auxiliary positioning method, positioning device and system for joint replacement
An auxiliary positioning and joint replacement technology, applied in the field of medical devices, can solve the problems of poor accuracy and matching degree of prosthesis installation position, large trauma to patients, and low accuracy of osteotomy, and achieves improved accuracy and matching degree. The effect of high bone accuracy and reduced operational risk
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the objectives, technical solutions, and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be described clearly and completely in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of the embodiments of the present invention, not all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
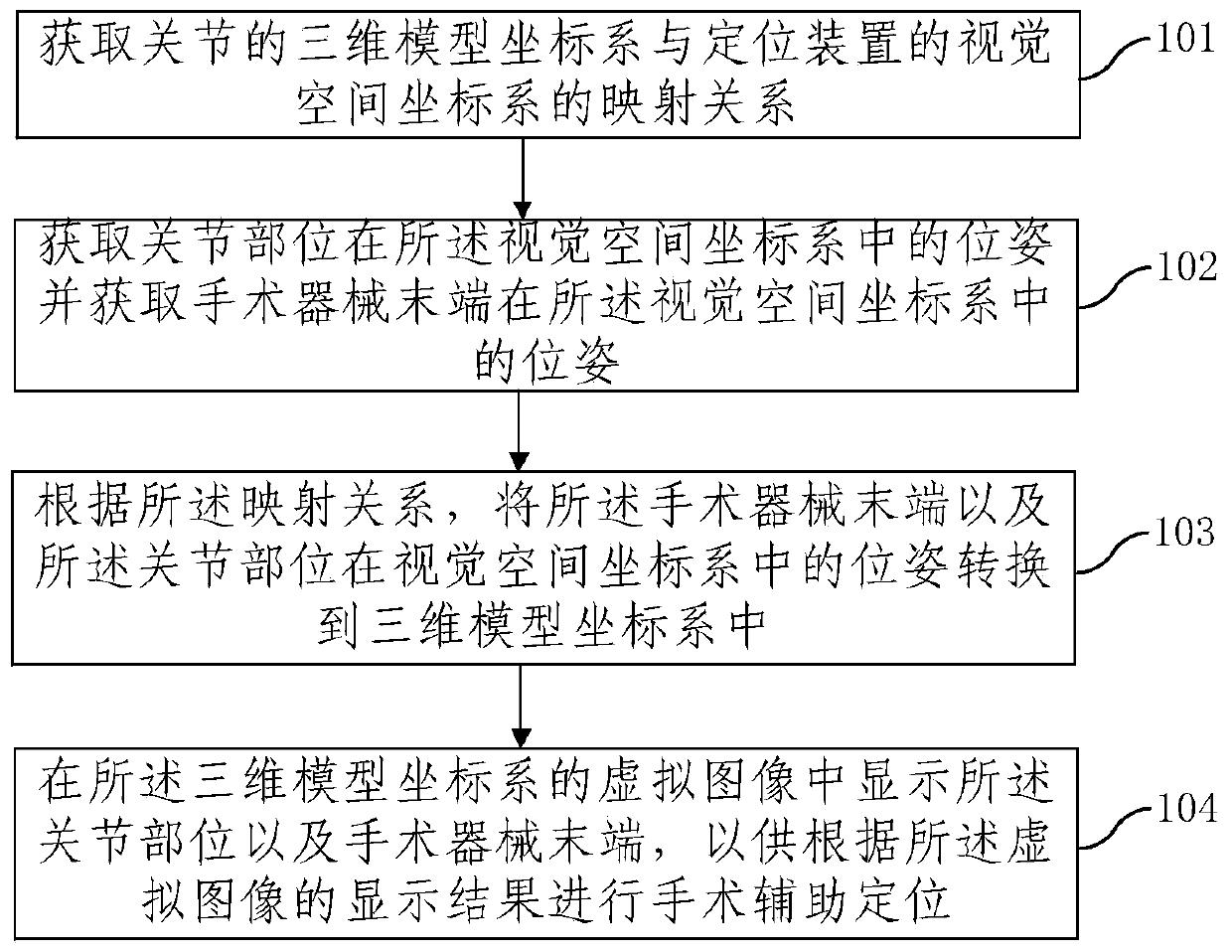
[0018] The embodiment of the present invention provides an auxiliary positioning method for joint replacement surgery. This method can be applied to joint replacement surgery scenarios such as knee joints or hip joints. In the specific implementation process, the method can be implemented by the corresponding surgical auxiliary posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More