

Voice coil motor driven Lorenz force type fast tool servo (FTS) repeated sliding mode composite control method
A Lorentz force type, voice coil motor technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of lack of tracking, inability to completely determine the mathematical model, slow change of characteristic parameters, etc. Achieve high-precision tracking and suppression
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
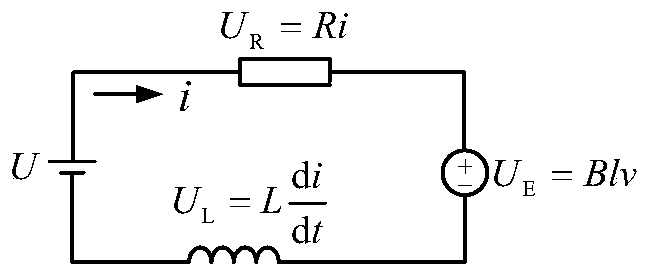
[0531] The selected motor is a voice coil linear motor, and the specific parameters are: magnetic induction intensity B=484.40T, total coil length l=266mm, resistance R=3.6Ω, total mass of the voice coil linear motor mover m=280g, damping coefficient c= 0.045N·s·m -1 , spring constant k 1 =5720 N / m.
[0532] Agent-based sliding mode control parameters: k p =50,k i =0.03,k d =0.0019, V=1, β=0.00001.
[0533] Improved repetition control parameter: ω q =99rad / s, T=0.001,τ b =0.00093,k p1 =200,k d1 = 0.1.
[0534] The sampling time of this patent is 1ms, and the limit value of the saturation function is S L =±0.5.
[0535] When the input is given as x i =0.001sin(300πt)m, the input and output curves are as follows Figure 21 As shown, the curve in the figure reflects that the control algorithm involved above has good tracking performance, and the system output can well realize high-precision tracking of a given input signal. When the system runs to 0.03s, adding 5N...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More