

Wheeled mobile robot control method
A mobile robot and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of not considering the chattering problem, so as to improve the anti-interference ability, enhance the system stability, weaken the The effect of output chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
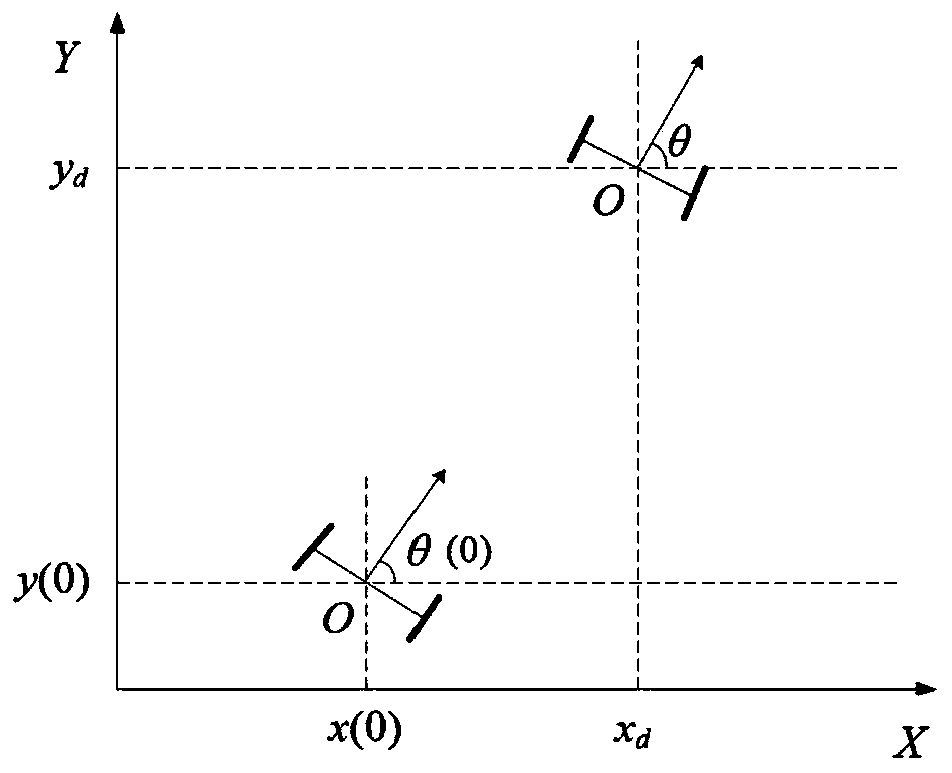
[0066] 1. Establish a wheeled mobile robot (WMR) kinematics model:
[0067] (1) A brief description of WMR;
[0068] WMRs are widely used due to their structural flexibility and functional diversity. It can be designed according to different application scenarios, and function planning can be carried out according to the tasks to be completed. This paper studies the most widely used trajectory tracking problem of WMR.
[0069] The essence of WMR is a control system with autonomous navigation capability, and its ability to track a specific trajectory is obviously very important. However, in actual engineering, especially in places with many obstacles, the path obtained by searching or fitting often does not conform to the ideal kinematics or dynamics model. Therefore, in the design of WMR trajectory tracking, consider External disturbances are of great significance to the feasibility, safety and autonomy of mobile robots. This paper makes the following assumptions about the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More