

Remote control robot for underwater precise measurement
An underwater robot and robot technology, which is applied in the field of remote control robots, can solve the problems of inability to pass through small underwater areas, unable to complete tasks, and unsatisfactory underwater measurement results, so as to improve the efficiency of cruising and measurement, and to achieve reasonable layout. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
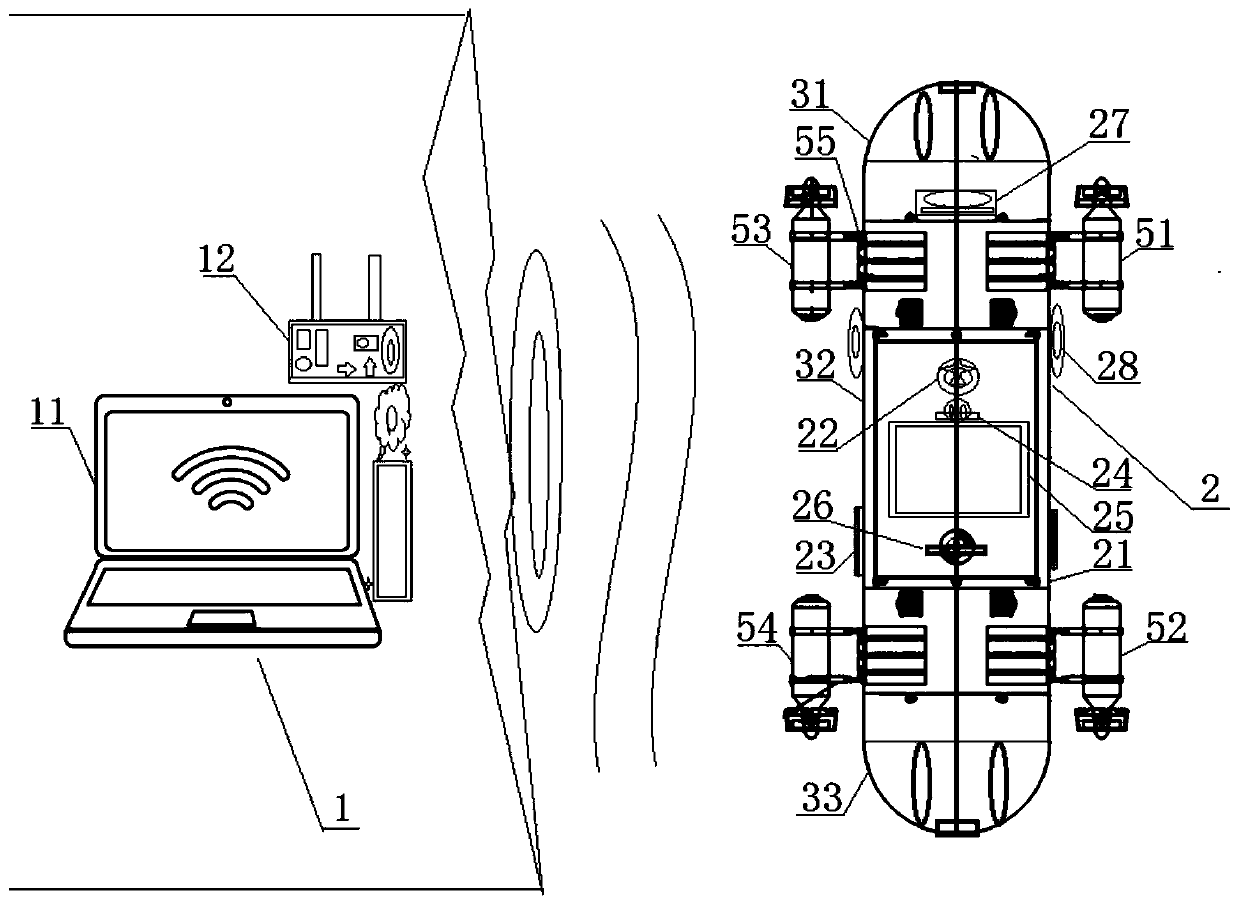
[0061] In the following, in conjunction with the accompanying drawings, the technical solution of a remote control robot for underwater accurate measurement provided by the present invention will be further described, so that those skilled in the art can better understand and implement the present invention.
[0062] 1. Hardware part
[0063] See figure 1 , The present invention provides a remote control robot for accurate underwater measurement, including a land control system 1 and an underwater robot 2. The land control system 1 includes a portable computer 11, a land communication unit 12, and a land control system 1. Through radio communication with the underwater robot 2, relying on the radio remote control system to complete the command transmission and information reception of the underwater robot 2, realize the relevant control functions of the underwater robot 2, and receive the ship speed, heading, and direction of the underwater robot 2. The operating parameters of la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More