

Lightweight lumbar auxiliary rehabilitation exoskeleton robot
An exoskeleton robot and lightweight technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as lack of flexibility, single specificity, and cumbersome maintenance, and achieve good man-machine comfort, compact internal structure, and simplified transmission structure effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings.
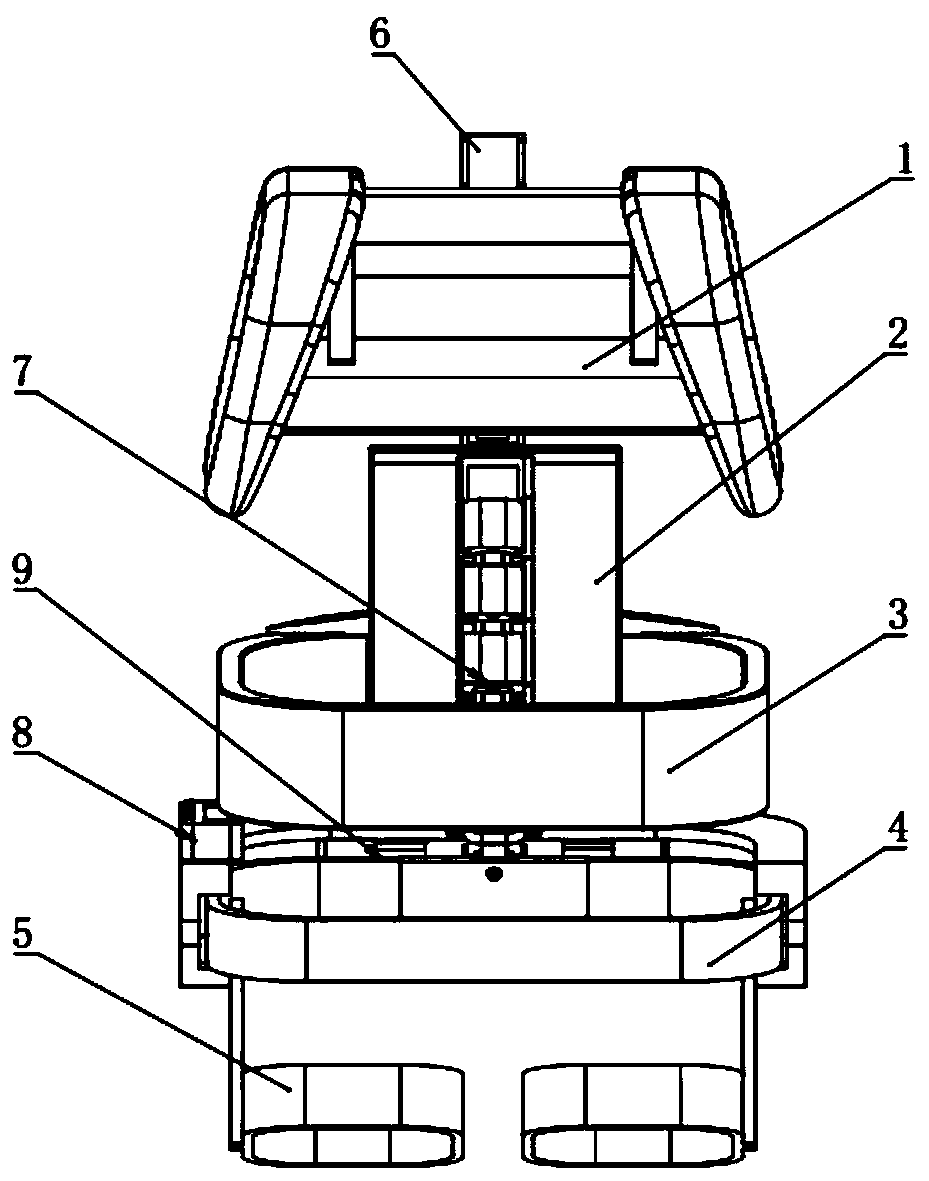
[0042] Such as figure 1 As shown, a lightweight lumbar auxiliary rehabilitation exoskeleton robot provided by the present invention includes a back spine traction mechanism 1, a waist curve traction mechanism, an abdomen fixed support mechanism 4, a spine rehabilitation exoskeleton leg fixation mechanism 5, a back support mechanism 6, Spinal exoskeleton handheld terminal 8 and drive control box 9.
[0043] Among them, the waist curve traction mechanism includes the spine waist bionic structure 2, the spine waist driving mechanism 7 and the intelligent adjustable elastic belt 3; the back support mechanism 6 is provided with two sliding grooves from top to bottom, and the back spine traction mechanism 1 is slidably installed In the upper slide groove of the back support mechanism 6, the upper end of the spine waist drive mechanism 7 is installed in the lower slide groov...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More