

Cutting depth prediction method and device suitable for abrasive belt grinding and polishing of complex curved surface robot
A technology of robotic abrasive belt and cutting depth, which is applied in the direction of abrasive belt grinders, prediction, grinding/polishing equipment, etc., can solve the problems of reducing the machining accuracy of the workpiece, the amount of material removal is difficult to control, and the contact stress distribution cannot be accurately calculated. Reduction of waste, accurate prediction of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
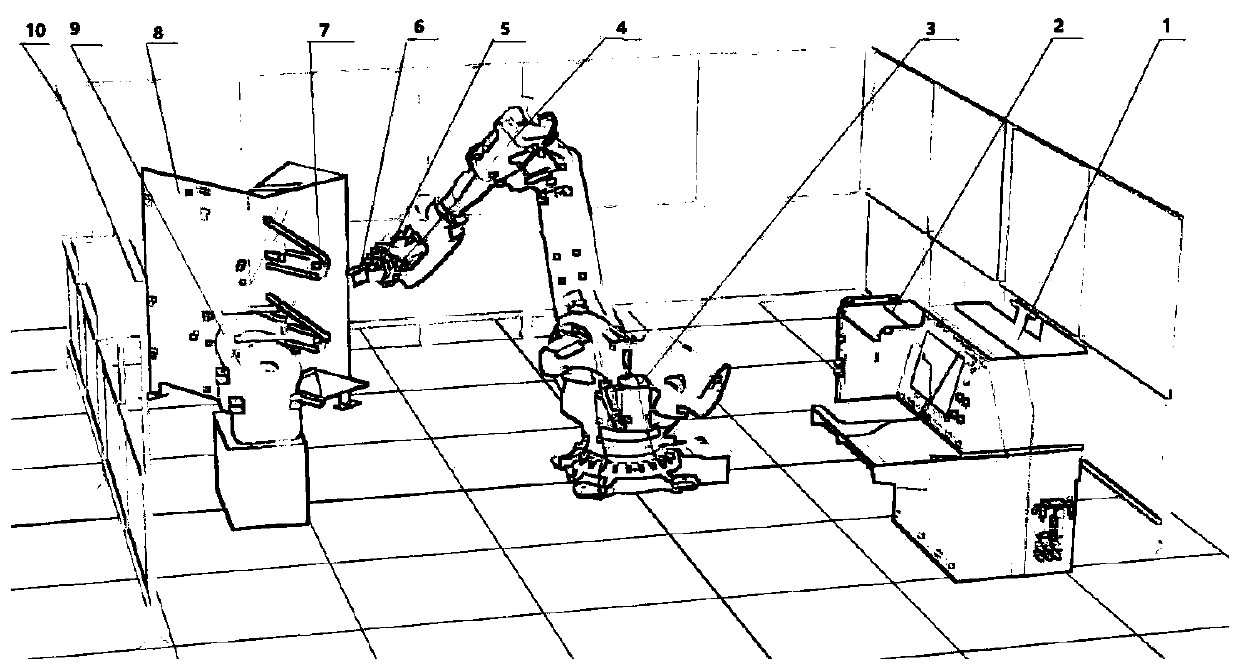
[0021] figure 1 An application scene diagram of a cutting depth prediction method suitable for complex curved surface robot abrasive belt grinding and polishing provided by the embodiment of the present invention, as shown in figure 1 As shown, in the fence 10, the robot abrasive belt grinding and polishing system includes a force-controlled robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More