

Complete-modularized flexible joint based on high-speed serial communication
A high-speed serial and flexible joint technology, which is applied in the direction of manipulators, program-controlled manipulators, and manufacturing tools, can solve the problems of large space occupation, insufficient joint integration, and small, dexterous and safe manipulator joints. Achieve the effect of reducing the difficulty of assembly, facilitating horizontal expansion and replacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
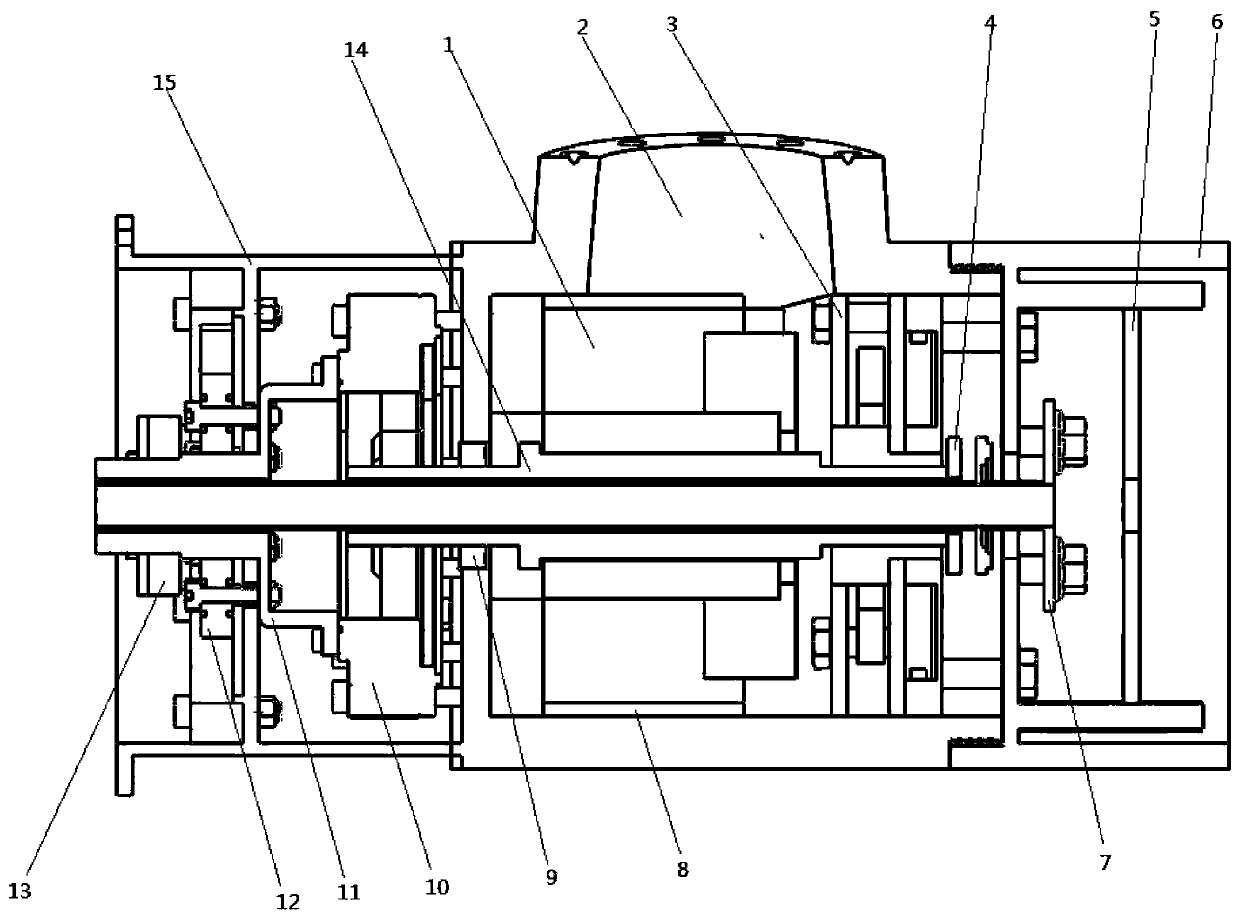
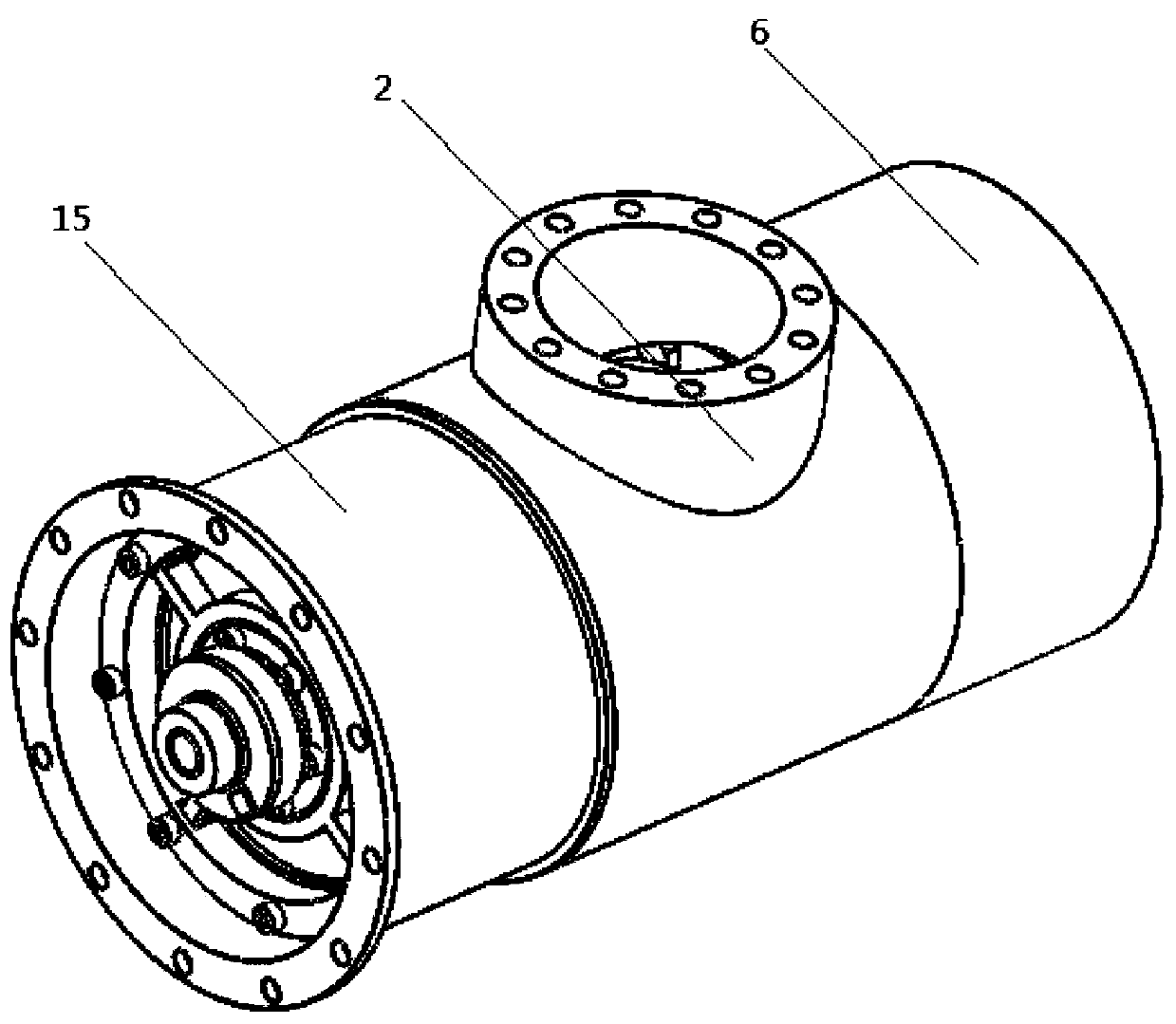
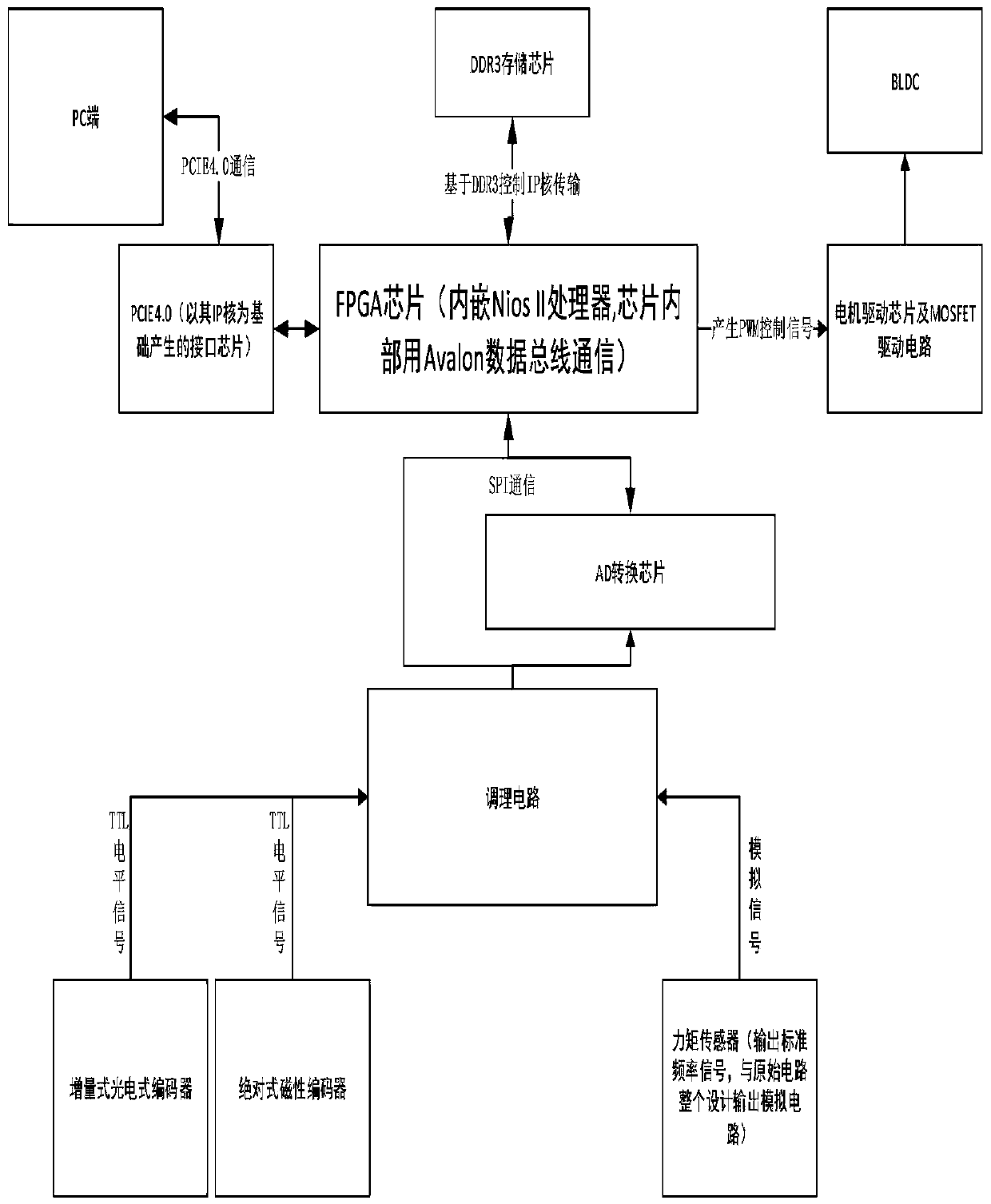
[0052] The internal structure and layout of the modular joints of existing manipulators are relatively complex and the flexibility of the joints needs to be improved; the performance of the control communication system of the joints needs to be improved; the purpose of the present invention is to achieve precise position control and joint flexibility. On the inside, the drive-control integrated servo system design based on the high-speed serial bus is realized inside the joint.
[0053] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
[005...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More