

Semi-submersible unmanned vehicle submarine three-dimensional terrain detection device and method
A technology of unmanned aerial vehicles and three-dimensional terrain, which is applied in the direction of measuring devices, unmanned surface ships, radio wave measurement systems, etc. The effect of small terrain detection effect, good airworthiness and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
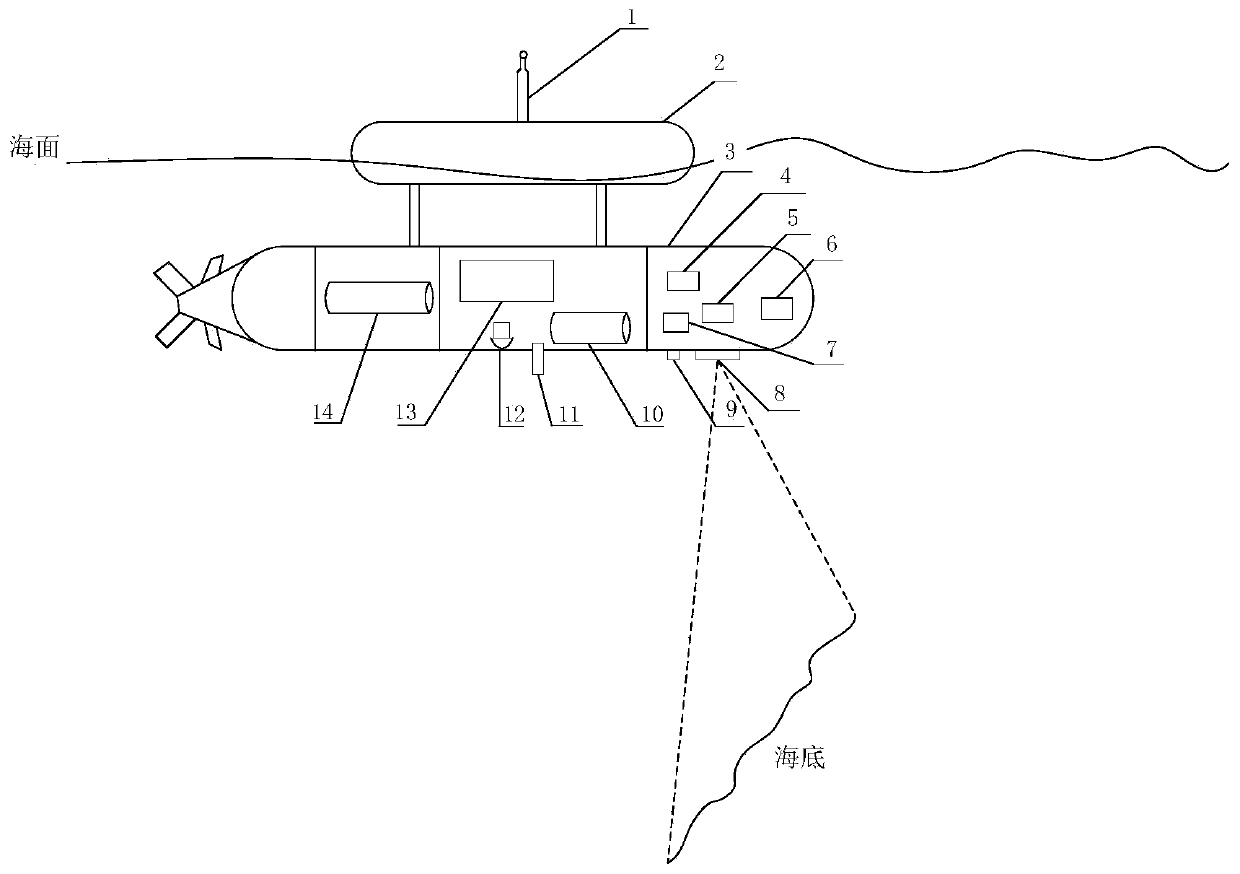
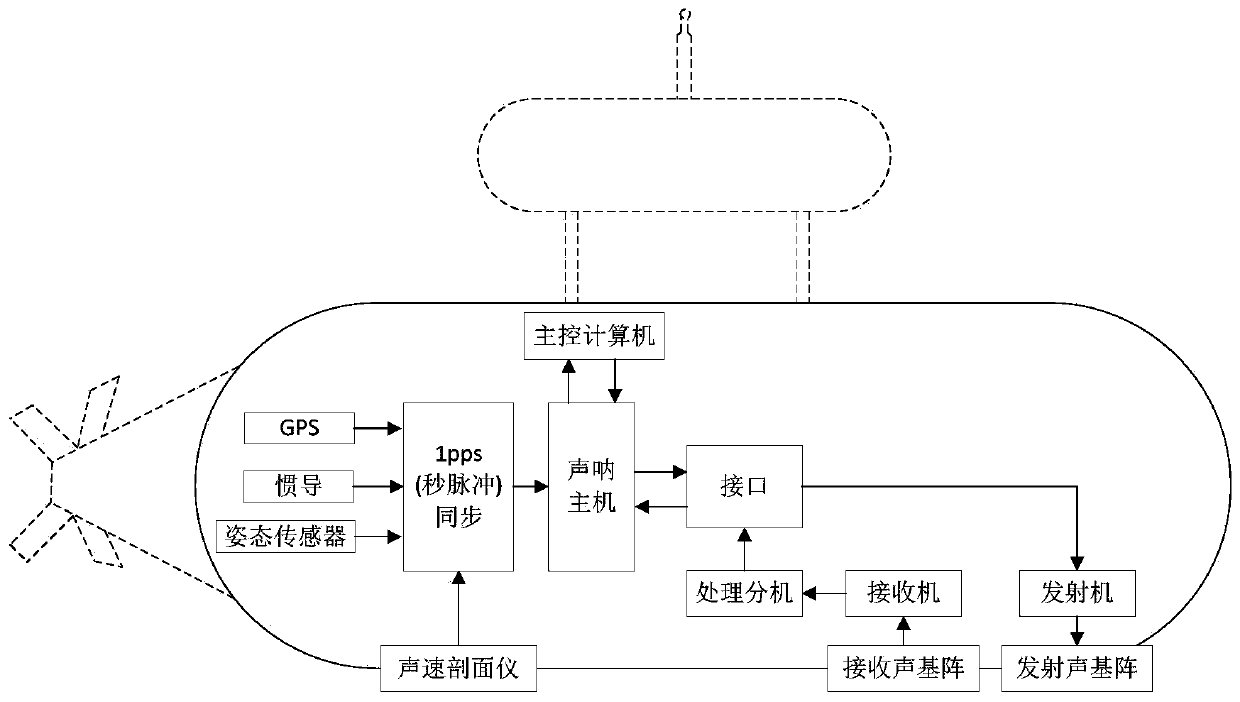
[0040] combine figure 1 , the semi-submerged unmanned vehicle seabed three-dimensional terrain detection device of the present invention is: the semi-submerged unmanned vehicle comprises a floating body 2 and a main hull 3, a GPS antenna 1 is arranged above the floating body, and a processing extension 4 is arranged on the main hull. Transmitter 5, attitude sensor 6, receiver 7, transmitting acoustic array 8, receiving acoustic array 9, sonar host 10, sound velocity profiler 11, inertial navigation system 12, main control computer 13 and lithium battery 14. Such as figure 2 As shown, the multi-beam sonar terrain detection system includes a processing extension 4 , a transmitter 5 , a receiver 7 , a transmitting acoustic array 8 , a receiving acoustic array 9 and a sonar host 10 .
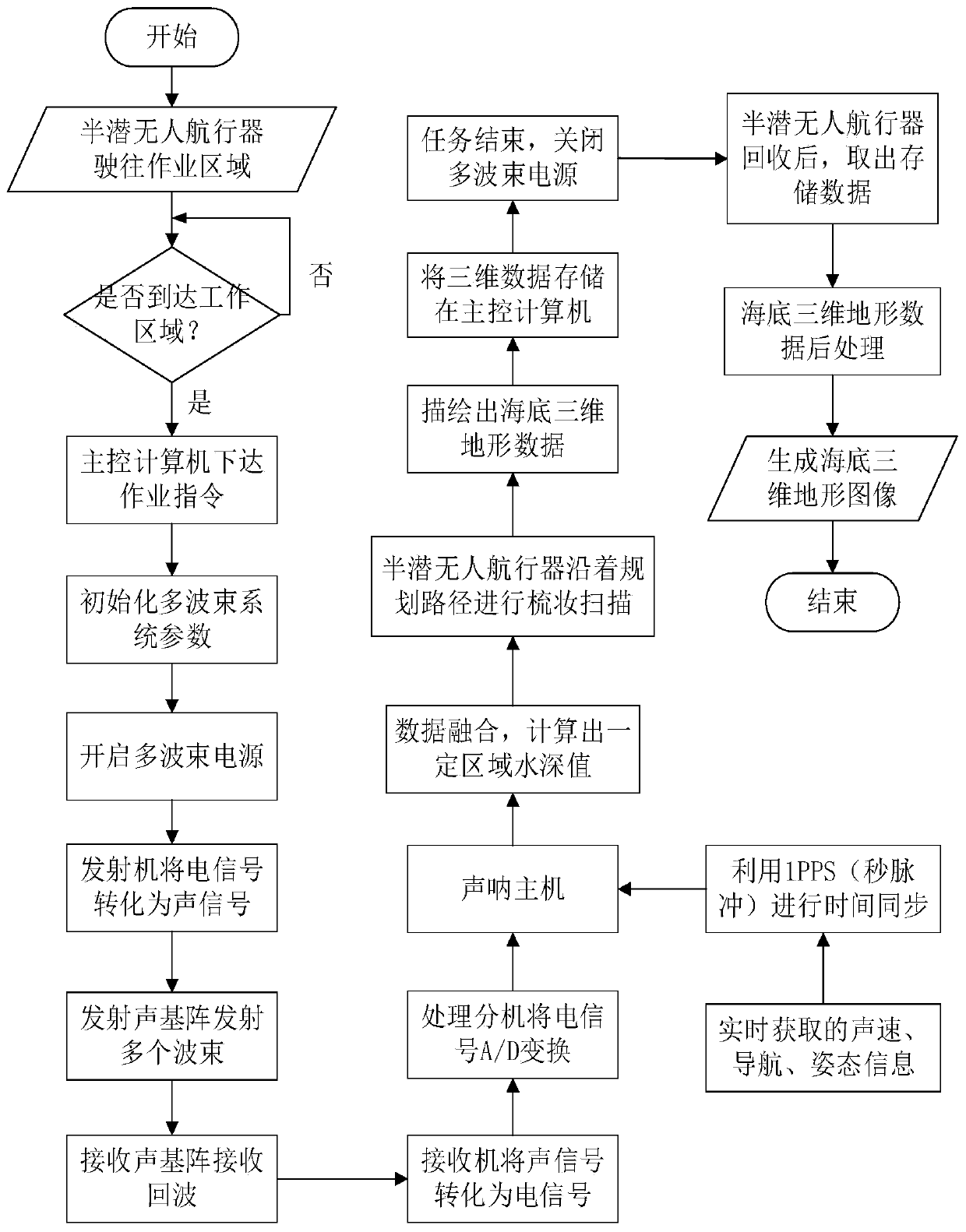
[0041] combine image 3 , the semi-submerged unmanned vehicle seabed three-dimensional terrain detection method of the present invention comprises the following steps:
[0042] Step 1: After the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More