

Digital terrain modeling method based on multi-source unmanned aerial vehicle remote sensing data fusion
A digital terrain and data fusion technology, applied in the field of UAV remote sensing in terrain surveying and mapping, can solve the problem of low elevation accuracy and achieve the effect of promoting the construction process, realizing sustainable development, improving surveying and mapping efficiency and modeling accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Specific examples are given below to further describe the technical solution of the present invention in a clear, complete and detailed manner. This embodiment is the best embodiment on the premise of the technical solution of the present invention, but the protection scope of the present invention is not limited to the following embodiments.
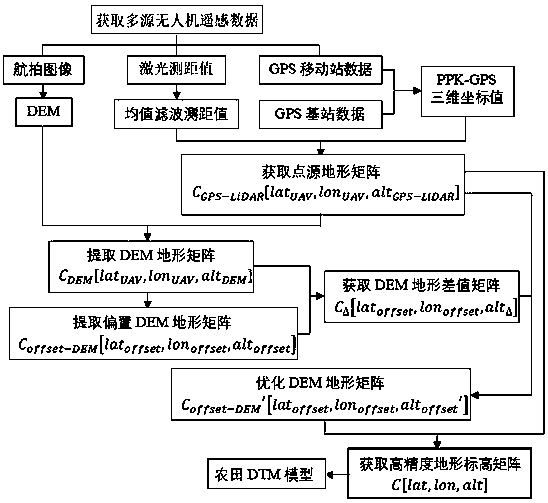
[0030] A digital terrain modeling method based on the fusion of multi-source UAV remote sensing data, combined with the data fusion technology of multi-source sensors such as UAV remote sensing image, laser rangefinder and GPS data, including the following steps, the flow chart is as follows figure 1 Shown:
[0031] Step 1. Vertically install the image acquisition equipment and laser rangefinder at the bottom of the UAV, and combine the technical requirements for aerial image stitching, image acquisition equipment parameters and the performance of the laser rangefinder to reasonably set the flight height and route of the UAV. Con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More