

Robot positioning method with fusion of visual features and IMU information
A robot positioning and visual feature technology, applied in the direction of instruments, computer parts, character and pattern recognition, etc., can solve problems such as insurmountable motion environment, and achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
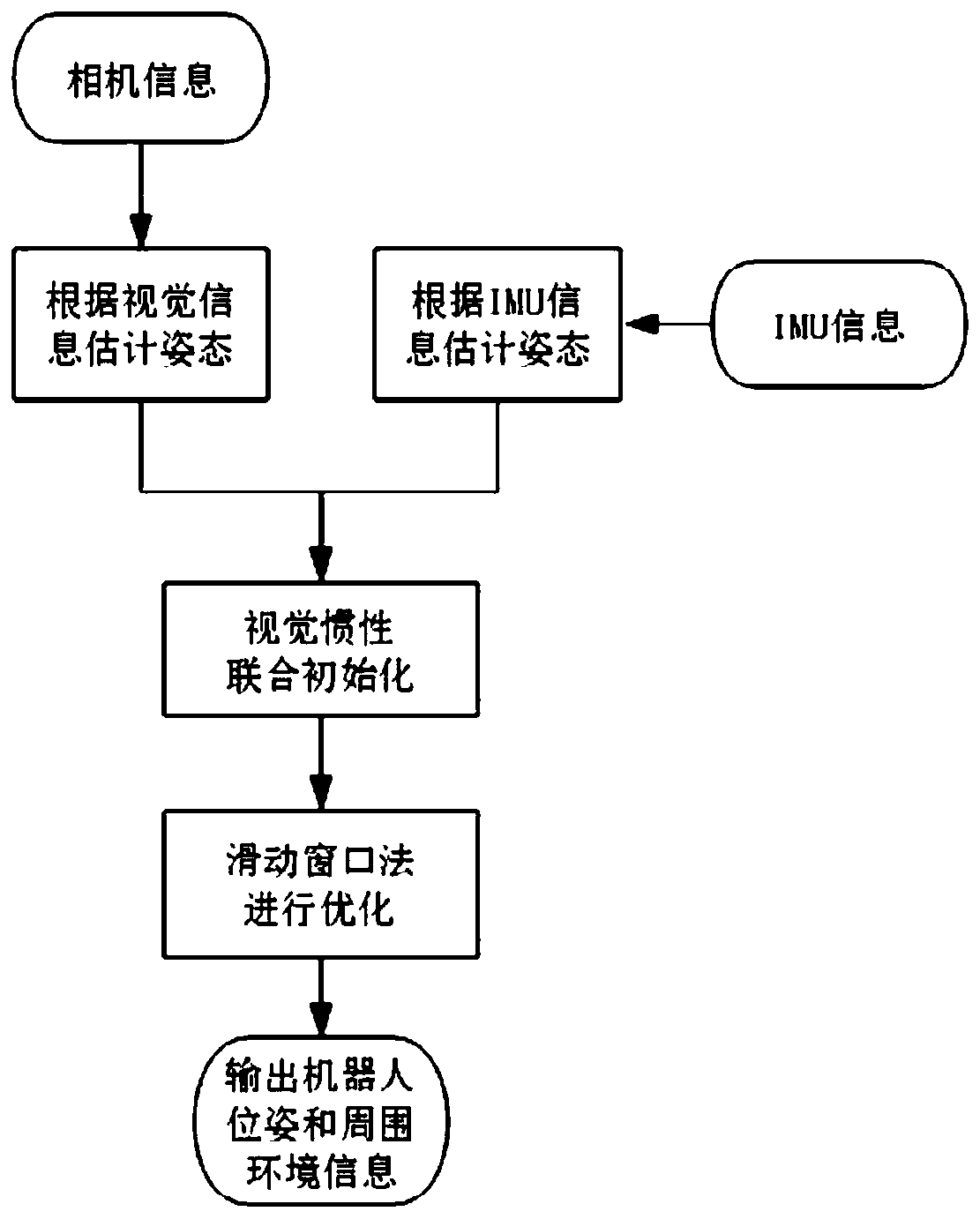
[0061] Knot figure 2 , the specific implementation method of the inventive method is as follows:
[0062] After connecting the MYNT EYE inertial navigation camera to the EAIBOT mobile car via USB, turn on the Lenovo thinkpad, input the camera operation command, and start the algorithm. In the example, the sampling frequency of the camera is 30HZ, the sampling frequency of the key frame is lower, and the sampling frequency of the IMU is 100HZ.
[0063] Step 1: The present invention first uses the ORB feature extraction algorithm to extract rich ORB feature points from the image frames captured by the MYNT EYE camera, and restores the monocular camera using multi-eye geometric knowledge according to the pixel positions of the feature points between the two frames of images The motion process of the robot is estimated.
[0064] Assume that the coordinates of a point in space are P i =[X i , Y i ,Z i ] T , whose projected pixel coordinates are U i =[u i , v i ] T , the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More