

Fault-tolerant tracking control method for nonlinear active suspension based on proportional-integral observer
A technology of active suspension and proportional integral, which is applied in the direction of elastic suspension, suspension, vehicle components, etc., can solve the problem of difficult control effect of the suspension system, to ensure progressive stability, the method is simple and easy to implement, and it is very robust sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] The present invention is further explained below in conjunction with the accompanying drawings.
[0115] as Figure 1 As shown in 2, considering the presence of nonlinearity and actuator faults in the active suspension of the vehicle, combined with the T-S fuzzy model method, H ∞ The output feedback control and proportional integration observer propose a fault-tolerant tracking control method so that the vehicle can maintain good performance after suspension failure.
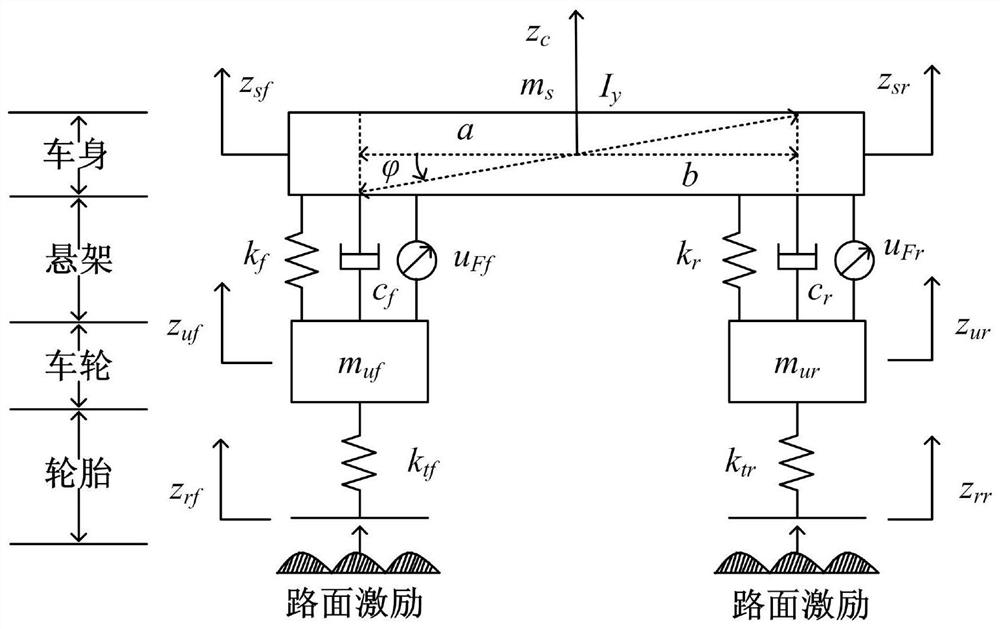
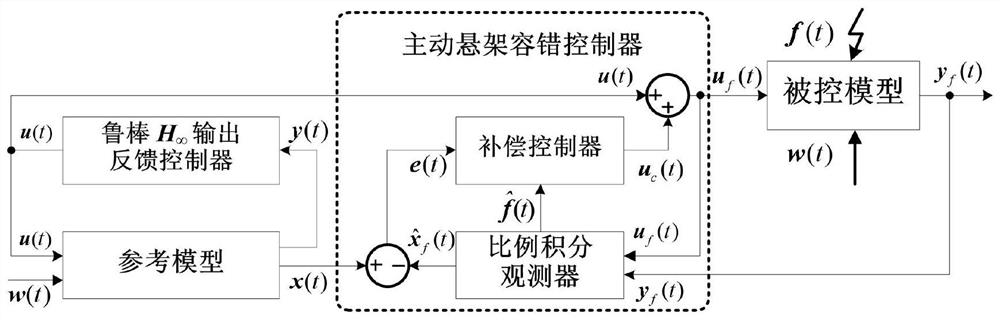
[0116] Figure 1 It is a model of a 4-degree-of-freedom 1 / 2 vehicle suspension system, which contains the main features of vehicle dynamics analysis and has a simple structure, so it is widely used in the study of suspension control strategies. furthermore Figure 2 Describes the structural framework of the fault-tolerant tracking control strategy based on the proportional integral observer in the presence of actuator fault and external road interference, the present invention is designed for an active suspensi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More