Method and system of collaborative operation of multiple groups of industrial robots
A technology of industrial robots and group robots, applied in the field of robots, can solve problems such as inability to realize network communication, poor effect, unsatisfactory effect of multi-group robot collaboration, etc., to achieve safe and reliable operation, low cost, and convenient management Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
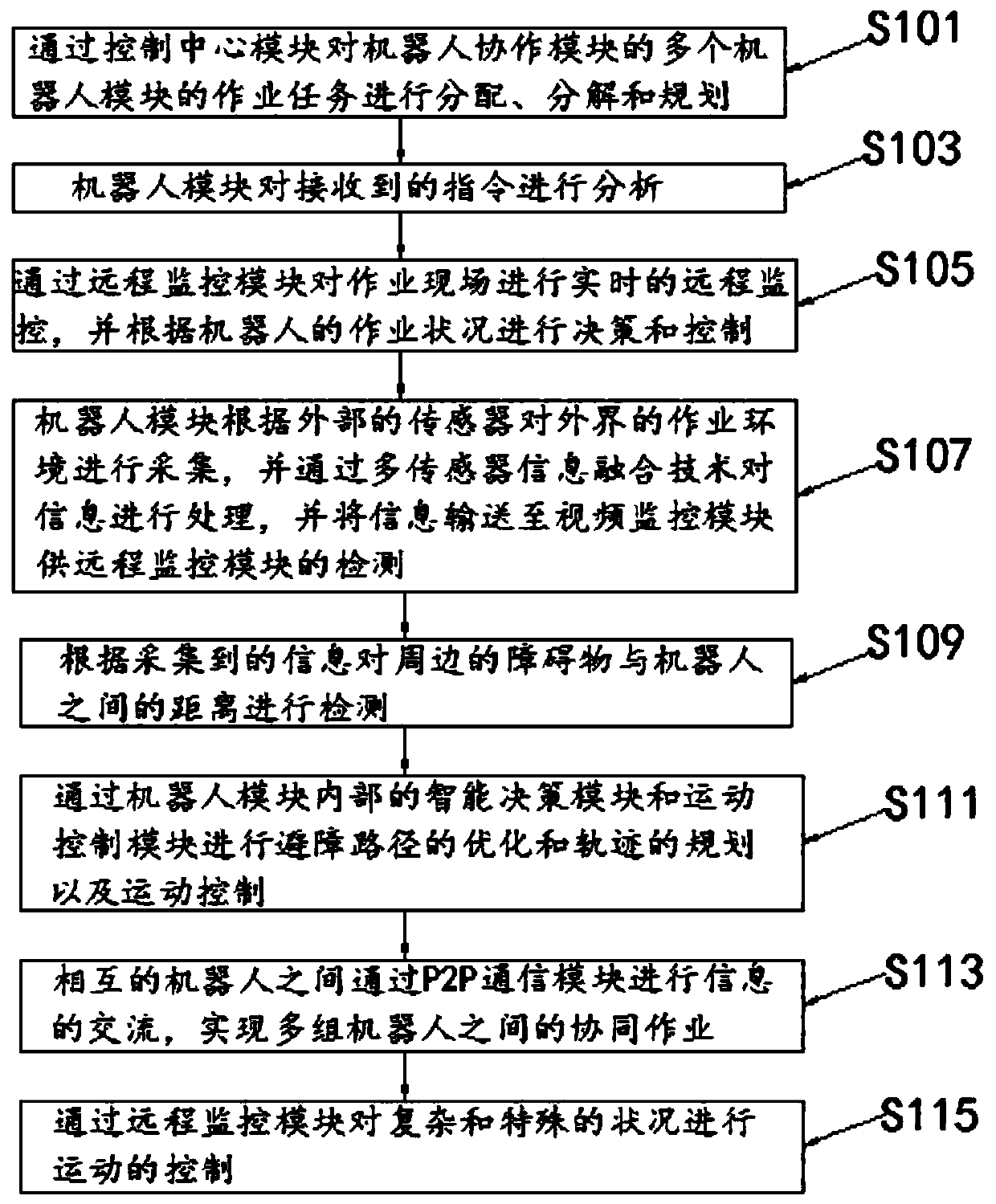
[0035] Example 1, such as figure 1 Shown, the present invention provides a kind of method for the cooperative operation of a plurality of groups of industrial robots, comprises the following steps:
[0036] S101: Assign, decompose and plan the operation tasks of the multiple robot modules of the robot collaboration module through the control center module;
[0037] S103; the robot module analyzes the received instructions;
[0038] S105: Carry out real-time remote monitoring of the job site through the remote monitoring module, and make decisions and control according to the robot's job status;
[0039] S107; the robot module collects the external working environment according to external sensors, processes the information through multi-sensor information fusion technology, and sends the information to the video monitoring module for detection by the remote monitoring module;
[0040] S109: Detect the distance between the surrounding obstacles and the robot according to the ...
Embodiment 2
[0045] Example 2, such as Figure 2 to Figure 5As shown, the present invention provides a system for the collaborative operation of multiple groups of industrial robots, including a remote monitoring module 1, a control center module 2 and a robot collaboration module 3, and the output terminal of the remote monitoring module 1 is connected to the control center module 2 It is connected with the input end of the robot cooperation module 3, the output end of the control center module 2 is connected with the input end of the robot cooperation module 3, and the remote monitoring module 1 includes a video monitoring module 4, a status display module 5, Data display module 6, parameter setting module 7, motion control module 178, remote desktop connection module 9 and C / S mode client communication module 10, described control center module 2 comprises C / S mode server communication module 11, data processing module 12. Intelligent decision-making module 13, information collection mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More