

Deep learning-based identifying and processing method for laser radar point cloud data
A point cloud data, lidar technology, applied in the field of deep learning, can solve the problems of high false recognition rate, the effect of final recognition, and inability to recognize, and achieve the effect of high recognition rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
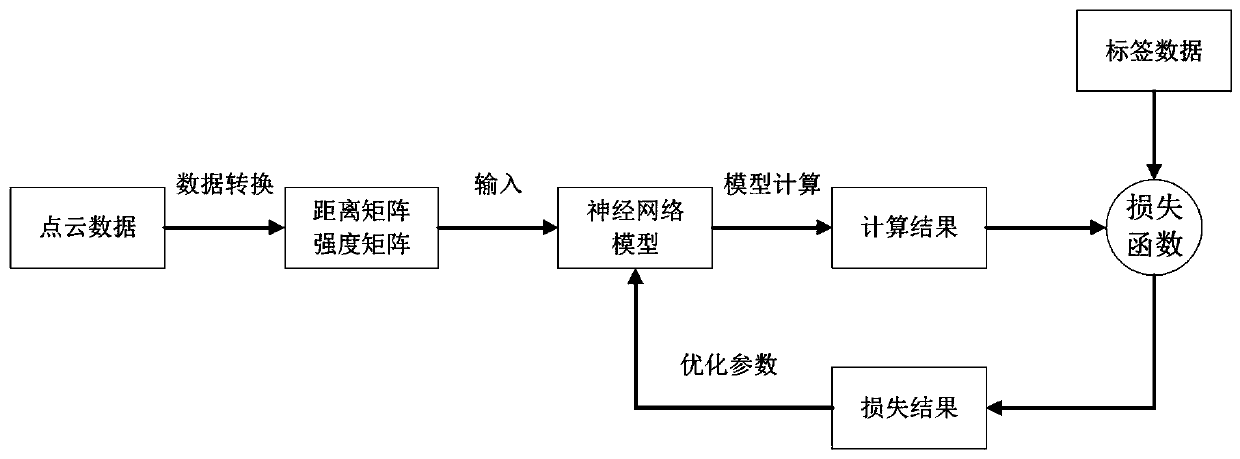
[0023] Embodiment 1: A deep learning-based recognition and processing method for lidar point cloud data, including the following steps:
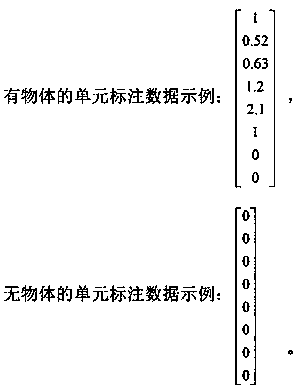
[0024] Step 1). Obtain the original point cloud data and label data. The original point cloud data includes the angle, distance and reflected light intensity value of each point. The original point cloud data is in the unit of frame, and one frame of data is the lidar scan Point cloud data generated through 360°;
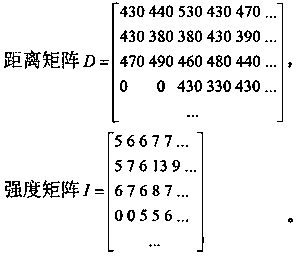
[0025] The following is a partial example of 16-line lidar raw point cloud data. Take the first data as an example, 333.03 represents the horizontal rotation angle, and the following 460 and 9 respectively represent the laser line scanning at -15° under the horizontal angle. 430 and 54 are the distance and reflected light intensity corresponding to the -13° laser line. The laser line angles corresponding to the following data are -11°, -9°, -7°, -5° , -3°, -1°, 1°, 3°, 5°, 7°, 9°, 11°, 13°, 15°. The format of summarizing a row of ori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More