

Euler-Bernoulli beam vibration control method based on backstepping iterative learning
An iterative learning and iterative technology, applied in the field of vibration control of Euler-Bernoulli beams, can solve the problem that the backstep iterative learning control method is rarely reported, achieve less prior knowledge and calculation amount, strong adaptability, Easy to achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
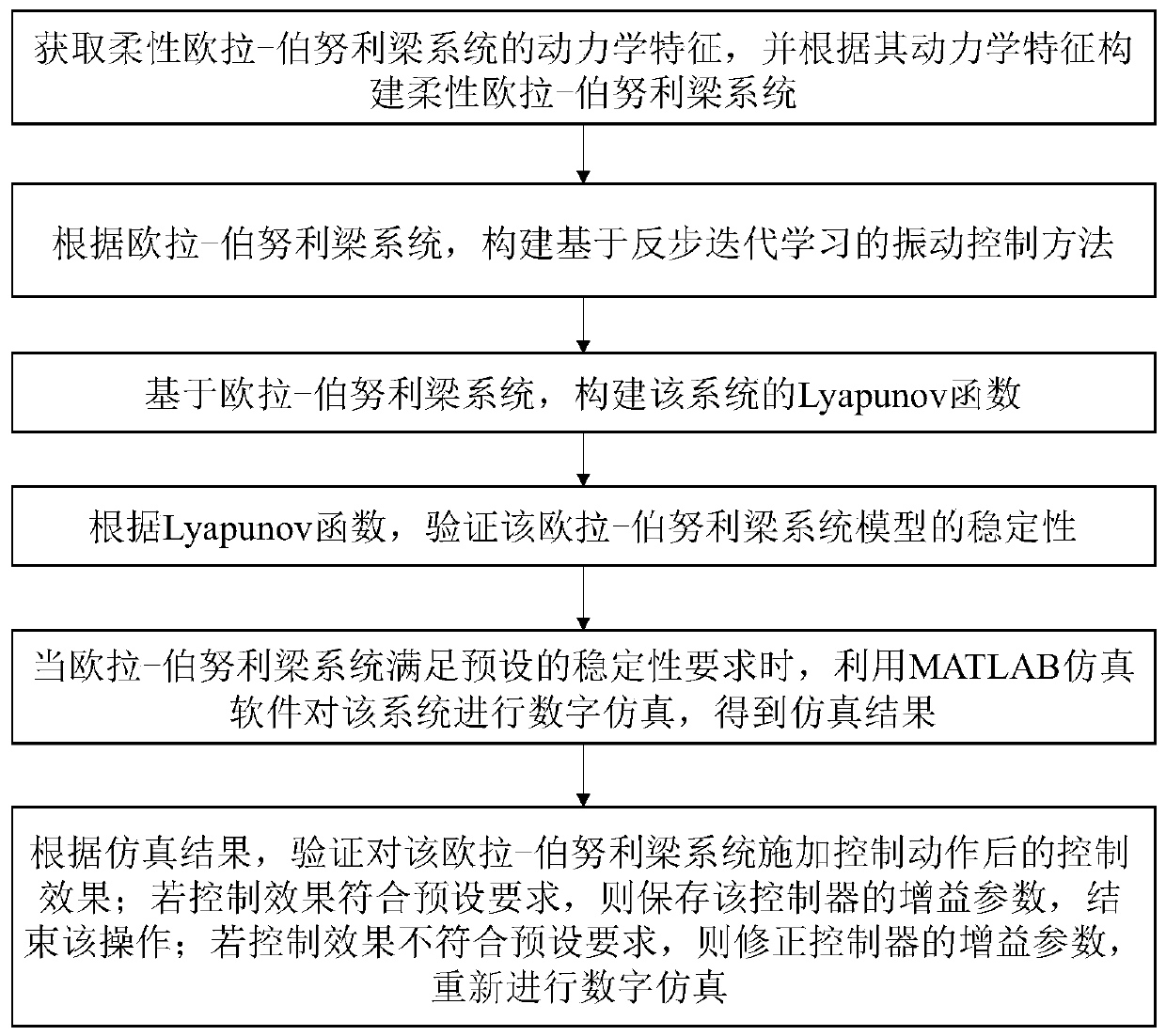
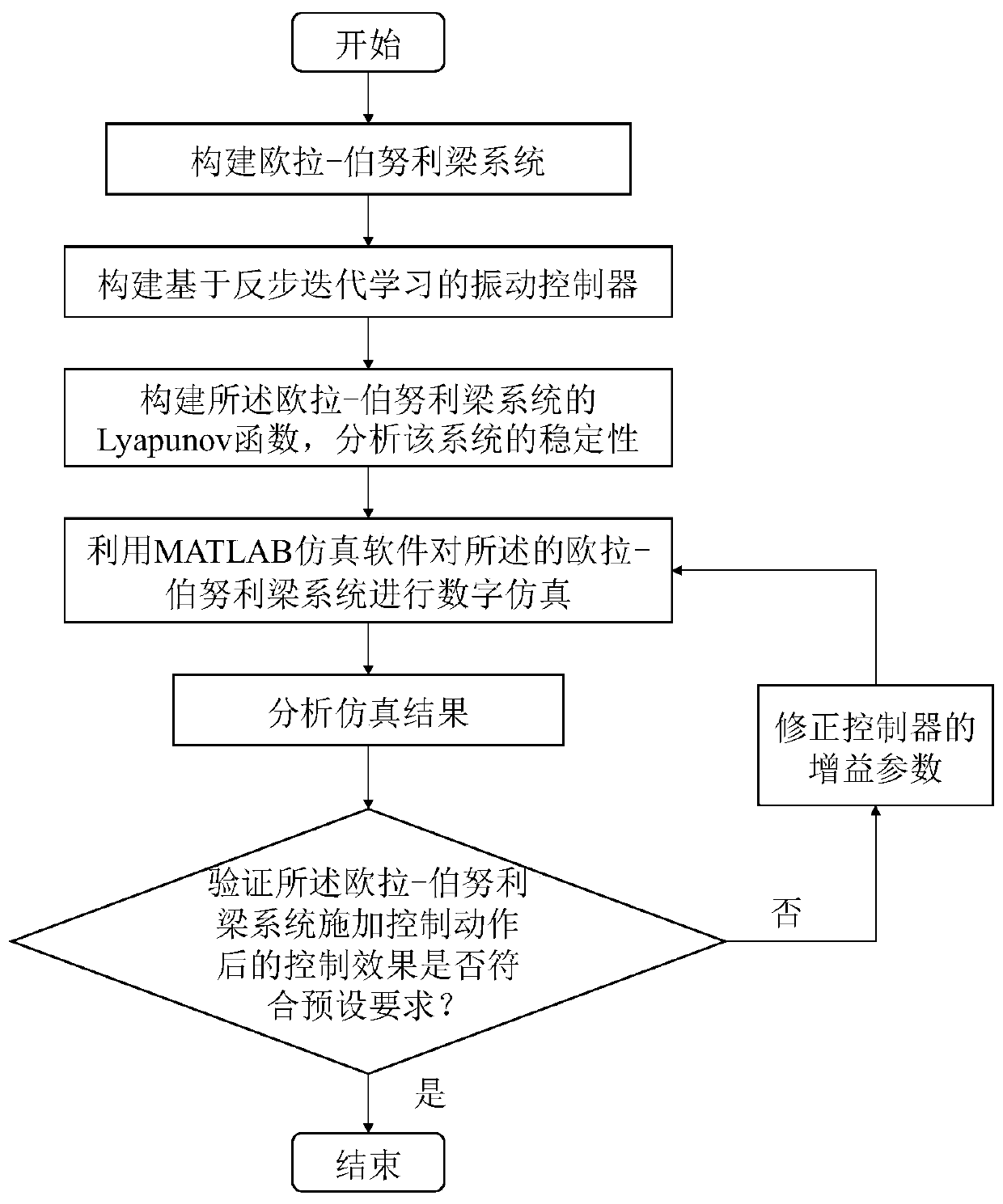
[0054] refer to figure 1 , figure 1 It is a flow diagram of the vibration control method of the Euler-Bernoulli beam based on backstepping iterative learning disclosed in the embodiment of the present invention, including the following steps:
[0055] S101. According to the dynamic characteristics of the Euler-Bernoulli beam, construct the dynamic model of the Euler-Bernoulli beam system.
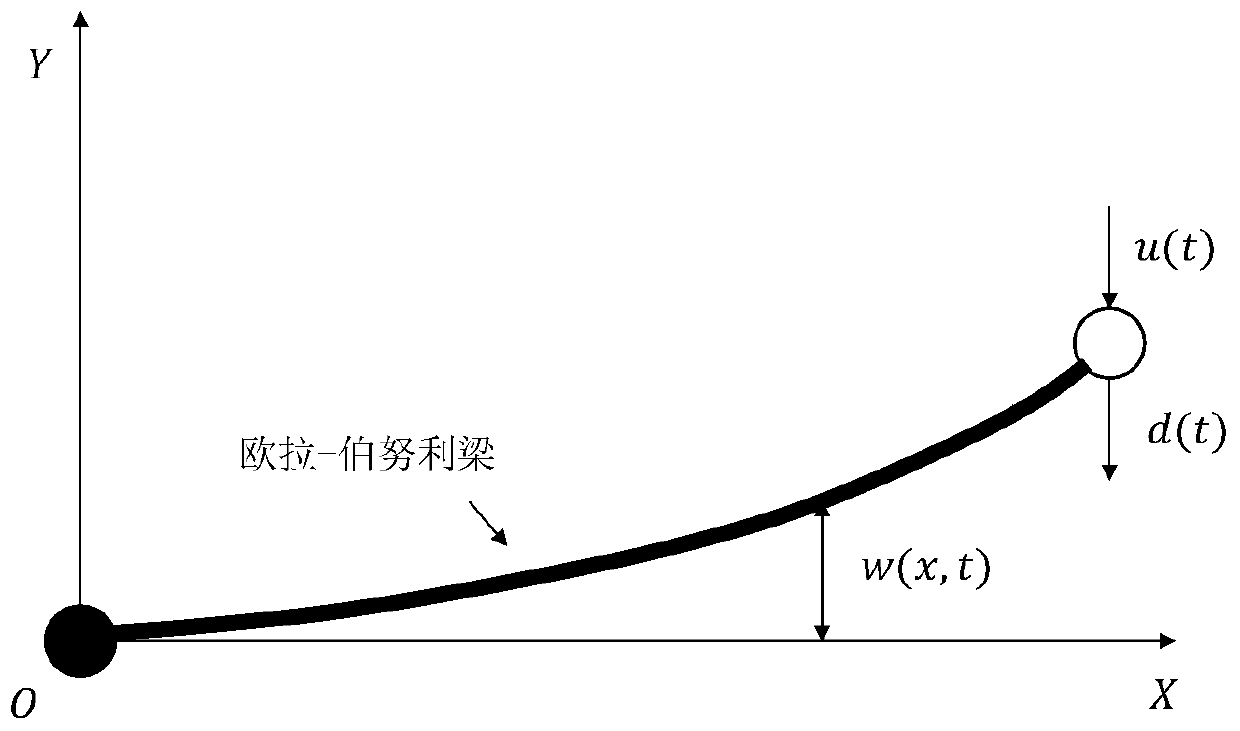
[0056] as attached image 3 As shown, a typical Euler-Bernoulli beam system, the left boundary of the flexible beam is fixed at the coordinate origin, and the boundary controller u(t) and the external unknown disturbance d(t) act on the right side of the flexible beam side. The length of the flexible beam is L, and its vibration displacement is w(x, t).
[0057] The dynamic equation of the Euler-Bernoulli beam structure is as follows:
[0058]
[0059] in, Represent the first and second derivatives of w(x, t) with respect to time, w'(x, t), w"(x, t), w"'(x, t), w""(x, t ) represe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More