Adaptive fault-tolerant control method based on sliding mode quantization output feedback
An output feedback, fault-tolerant control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
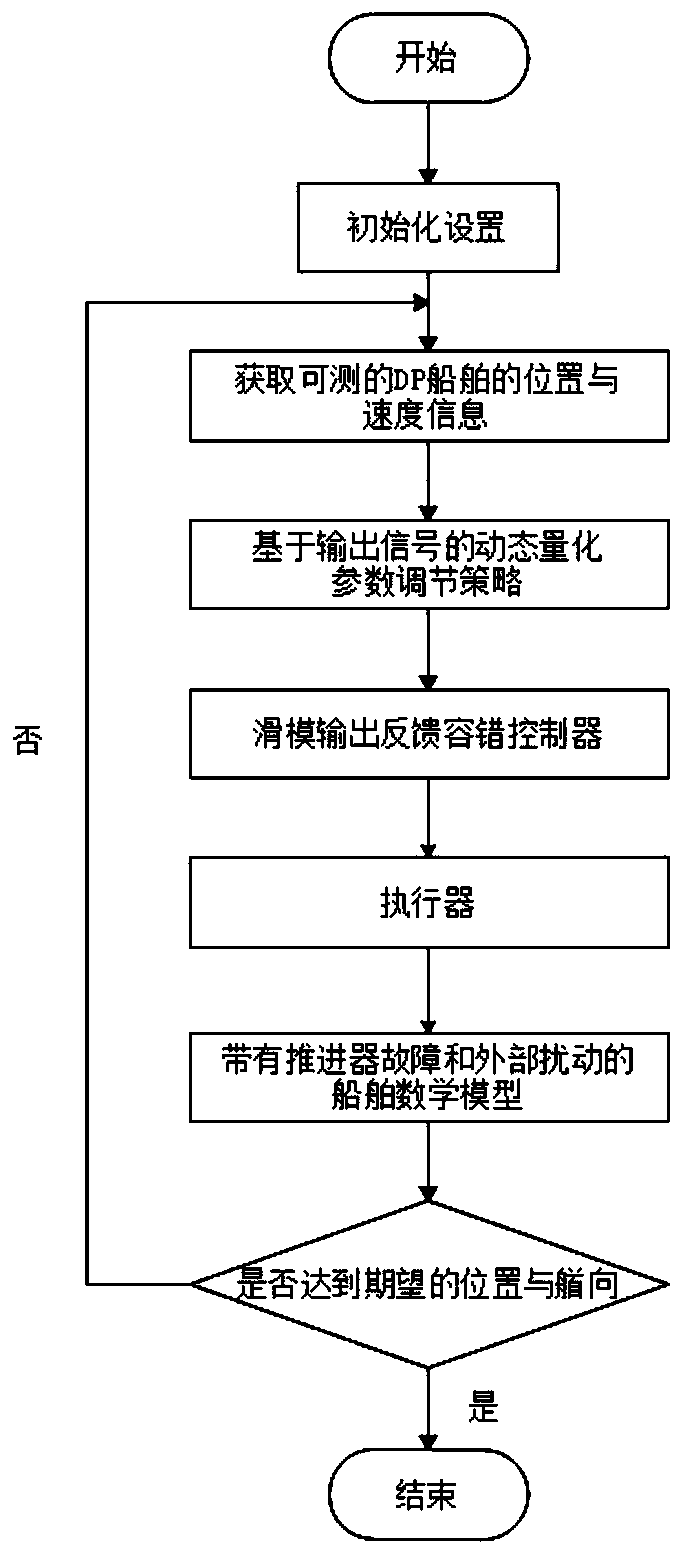
[0095] The step S1 is specifically:
[0096] S11, define the position vector as η(t)=[x p (t),y p (t),ψ(t)] T , the velocity vector is ν(t)=[ι(t), v(t), r(t)] T , when the heading angle ψ(t) is small enough, the mathematical model of DP ship is:
[0097]
[0098] Among them, M is the system inertia matrix, N is the system damping matrix, and G is used to represent the mooring force matrix;
[0099] Select the system state as x(t)=[η T (t), ν T (t)]T , with a desired position and velocity of x ref =[η ref T ,ν ref T ] T , the state error is e(t)=x(t)-x ref , after the transformation of the state error matrix, the DP control error system is:
[0100]
[0101] Among them, z(t) represents the adjusted output; y(t) represents the measured output; u R (t) represents a control input; w(t) represents the disturbance vector, Indicates the disturbance component; B 0 is the configuration matrix, C 1 、C 2 、D 1 is a known matrix with appropriate dimensions.
[...
Embodiment
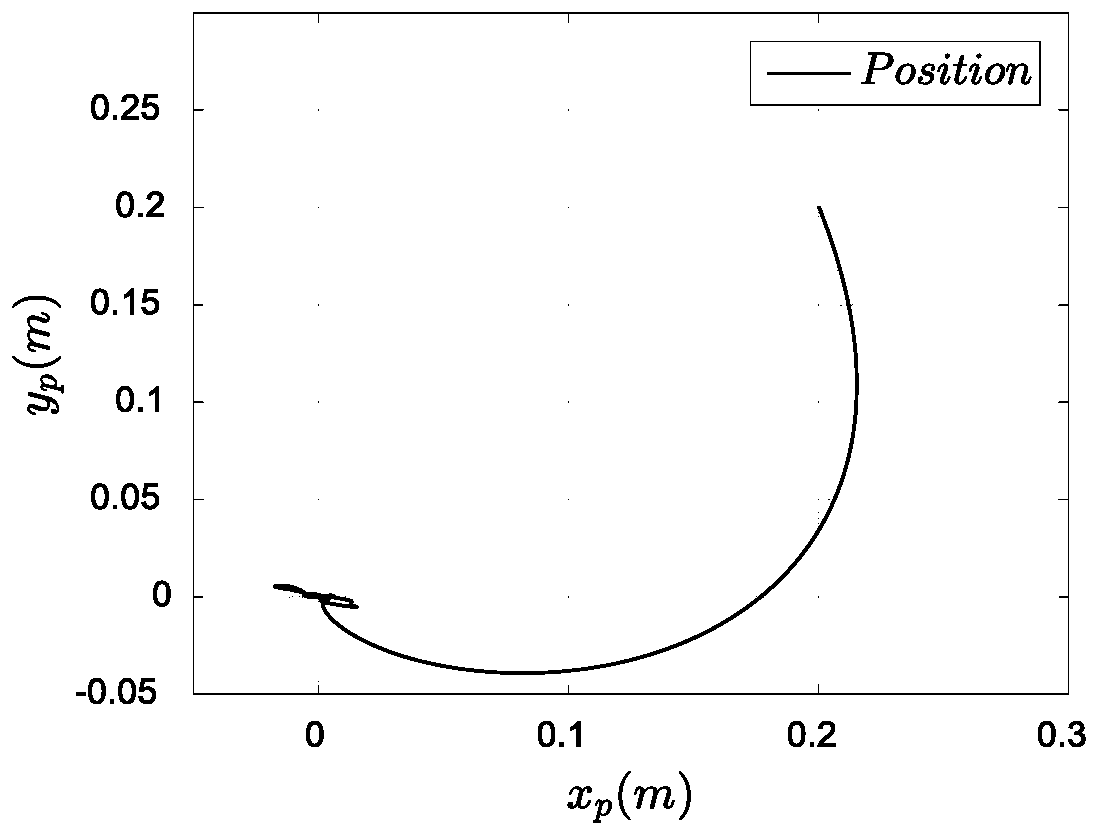
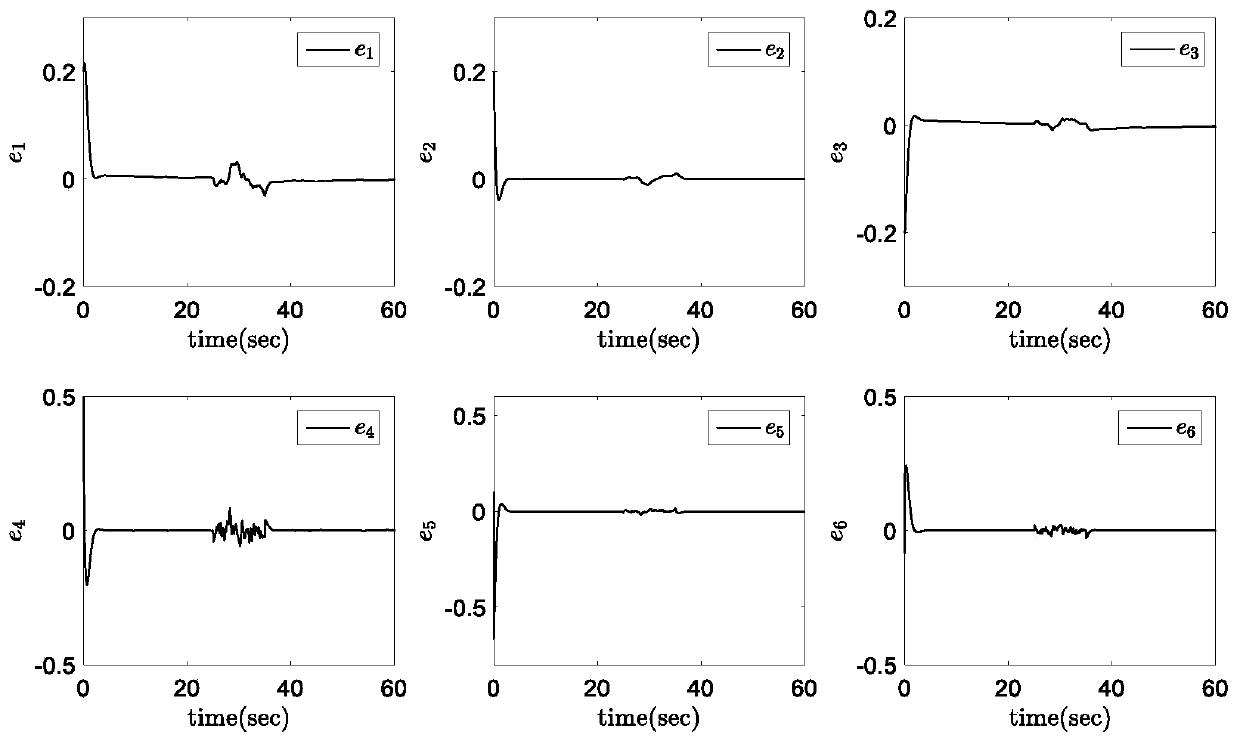
[0164] Taking a typical floating production vessel with a length of 200.6 meters and a mass of 73097.15 kilograms as an example, a simulation verification analysis is carried out to illustrate the effectiveness of the designed adaptive sliding mode fault-tolerant control law, and the parameters are as follows:
[0165]
[0166] The thruster failure occurs after 25s, and the thruster failure setting is: complete failure of the main propeller on the port side; 20% failure of the stern slot thruster I; stuck fault of the bow slot thruster, stuck fault value is set to u s (t)=0.2+0.2cos(t); the rest of the thrusters are in normal state.
[0167] Marine environmental disturbance is: w(t)=[w 1 w 2 w 3 ] T
[0168]
[0169] in, K 1 =0.2;K 2 = 0.6; ω 1 = 0.5; ω 2 = 1.6; σ 1 =0.7; σ 2 = 1; V 1 (t) and V 2 (t) represents the white noise of noise value 2 and 1.8 respectively; I 1 =[00 0 1 0 0]; I 2 =[0 0 0 0 1 0]; I 3 =[0 0 0 0 0 1]; x ref =[0 0 0 0 0 2] T . ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com