

Field crop phenotype monitoring robot and navigation method thereof
A technology for field crops and navigation methods, applied in the field of agricultural engineering, can solve the problems of large differences in expected effects, and achieve the effects of reducing destructive effects, high-throughput acquisition, and weakening effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
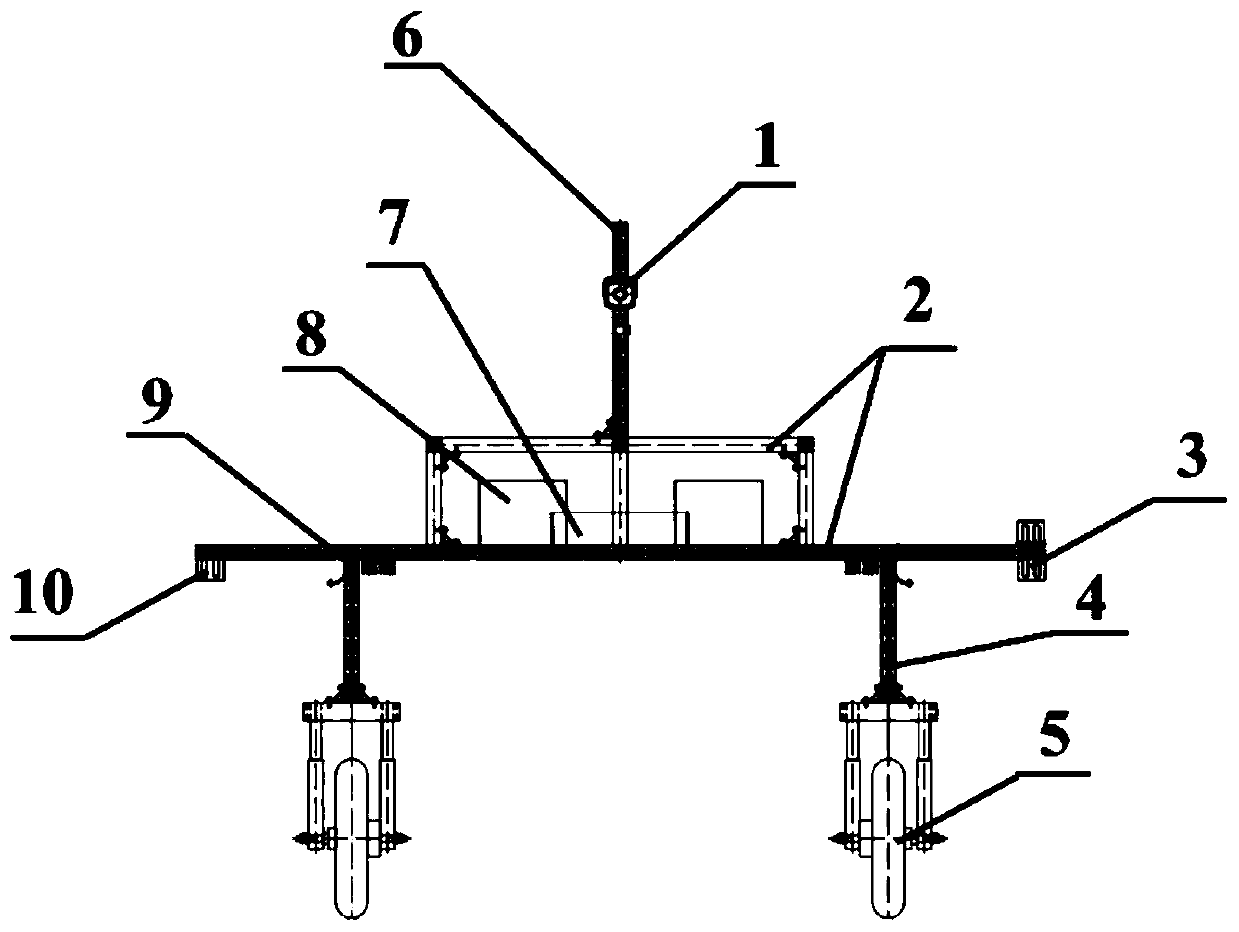
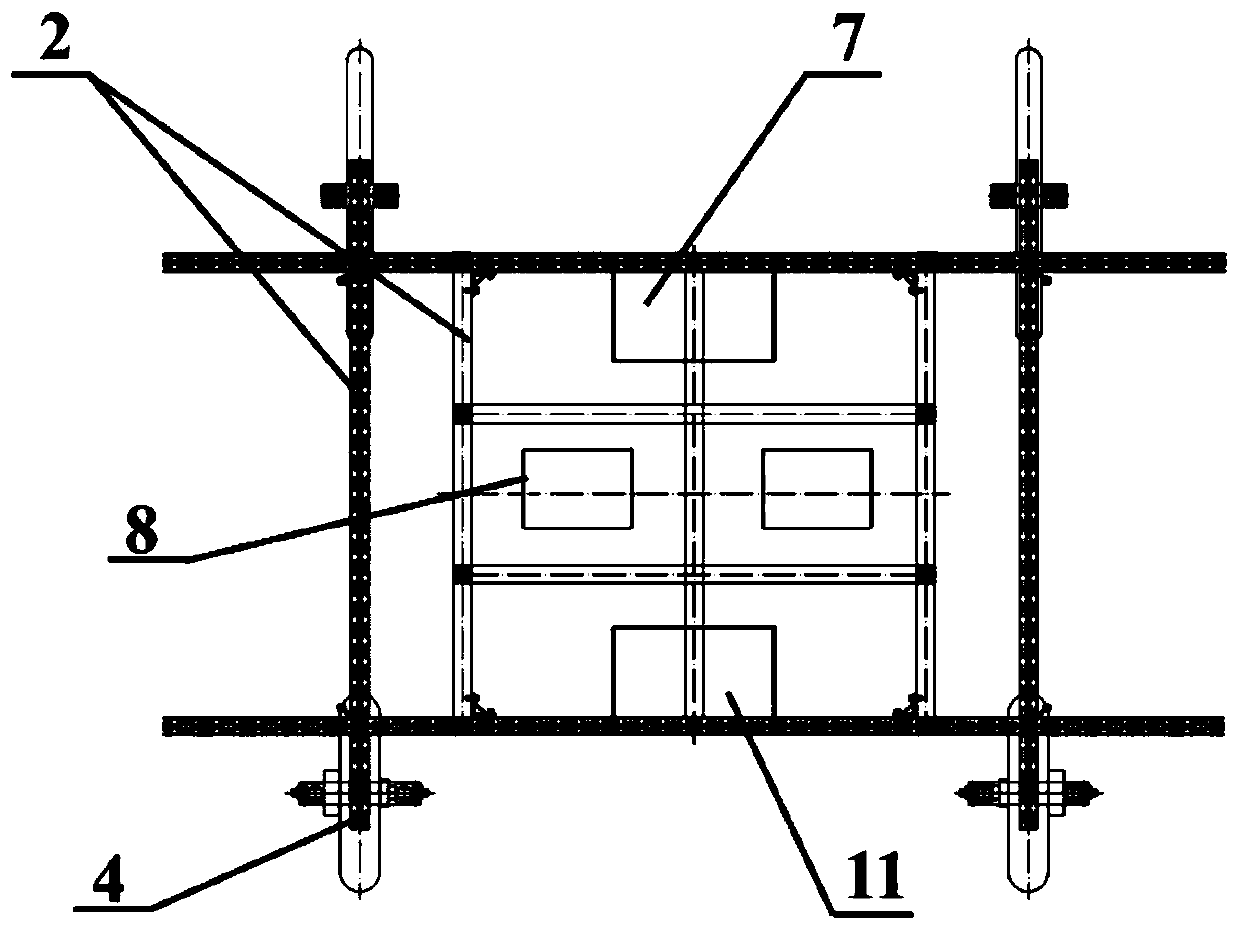
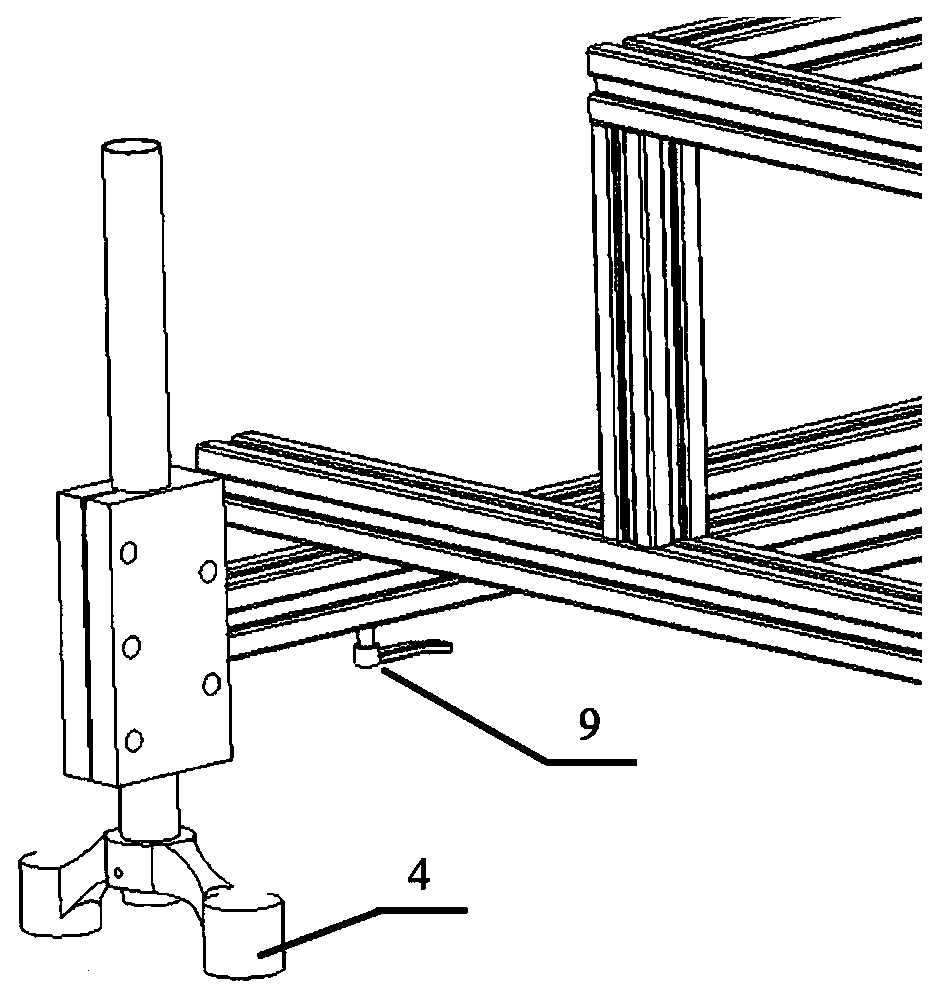
[0044] refer to figure 1 , 2 and 3, a field crop phenotype monitoring robot, specifically includes: body platform, power supply device 8, motion control device, environmental information sensor device 11 and crop growth information sensor device.
[0045] The vehicle body platform is used for carrying and installing, and mainly includes a vehicle frame 2 and a vertical support 6. The vehicle frame 2 is used to carry a power supply device 8, a motion control device and a sensor device. The length of the vehicle frame 2 is 1375CM, and the distance between the top and the The height of the ground is 1100CM, and the vertical support 6 is used to meet the test height requirements of different sensors, and the length of the vertical support is 60CM.
[0046] The power supply device 8 is used for power supply; in this embodiment, a 48V lithium battery is used for powering the motion control device and the sensor device. The power supply device 8 is placed in the installation box, and...
Embodiment 2
[0053] refer to Figure 6 A navigation method for a field crop phenotype monitoring robot. The navigation method first records the waypoints that the robot needs to pass through a GPS device. After the waypoint marking is completed, all the waypoints are converted into national 54 coordinates and input to the robot. software, when the robot executes the automatic navigation function, the robot control software calculates the route position and direction between adjacent waypoints in sequence according to the order of the waypoints. In the coordinate system, the software calculates the vertical position deviation between the robot and the route based on the real-time position of the robot and the position of the current route. The robot is also equipped with an inertial measurement unit placed parallel to the front of the vehicle. This measurement unit can output the heading angle of the robot in real time. According to the direction of the flight path and the heading angle of ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More