

Panoramic monitoring and linking control method and system for fire-fighting robot of transformer substation
A fire-fighting robot, panoramic monitoring technology, applied in the fields of instruments, image data processing, fire rescue, etc., can solve the problems of no auxiliary equipment, inaccurate information, low visibility of thick smoke, etc., to eliminate the interference of environmental factors , Improve the operation effect, the effect of quick response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
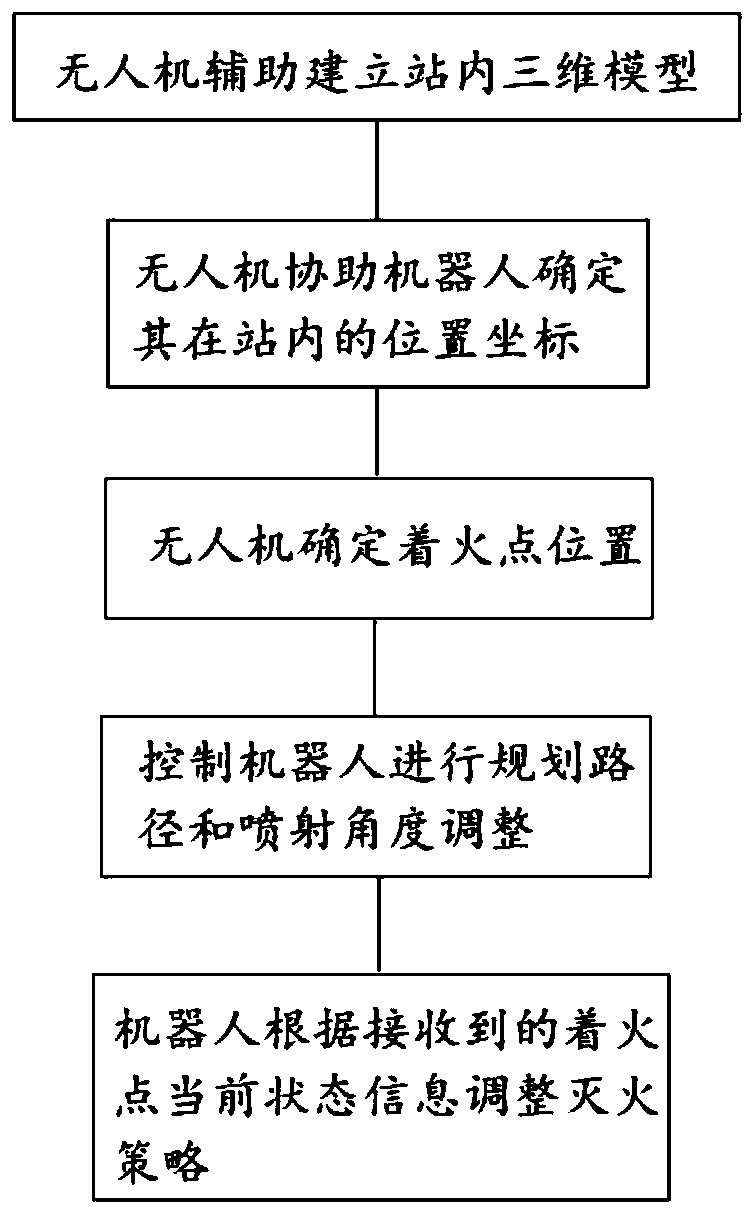
[0033] In one or more embodiments, a panoramic monitoring and linkage control method of a substation fire-fighting robot is disclosed, which relies on a substation fire-fighting robot and a drone communicating with the robot;
[0034] Specifically include the following processes:
[0035] (1) The UAV collects image information from different perspectives of the equipment in the station, and assists the substation fire-fighting robot to establish a three-dimensional model in the station;
[0036] The substation fire-fighting robot uses the multi-eye vision equipment equipped, constrained by the structural characteristics of the equipment in the station, and uses multi-view reconstruction to obtain a primary model of the substation as a whole; the specific process is as follows:
[0037] The parallax of two images captured by multiple cameras is used to construct a three-dimensional scene. After the target is detected, the three-dimensional information of the target is obtained ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More