

Plane three-degree-of-freedom precision positioning platform, and using method and control method thereof
A precision positioning and degree of freedom technology, applied in the direction of workbench, manufacturing tools, machine table/support, etc., can solve the problems of increasing the volume of the mechanism, the inability to adjust the end platform, and the heating of the mechanism, so as to achieve a large range of motion and reduce parasitic motion , Improve the effect of output stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings. It should be noted that the following embodiments are intended to facilitate understanding of the present invention, but do not limit it in any way.
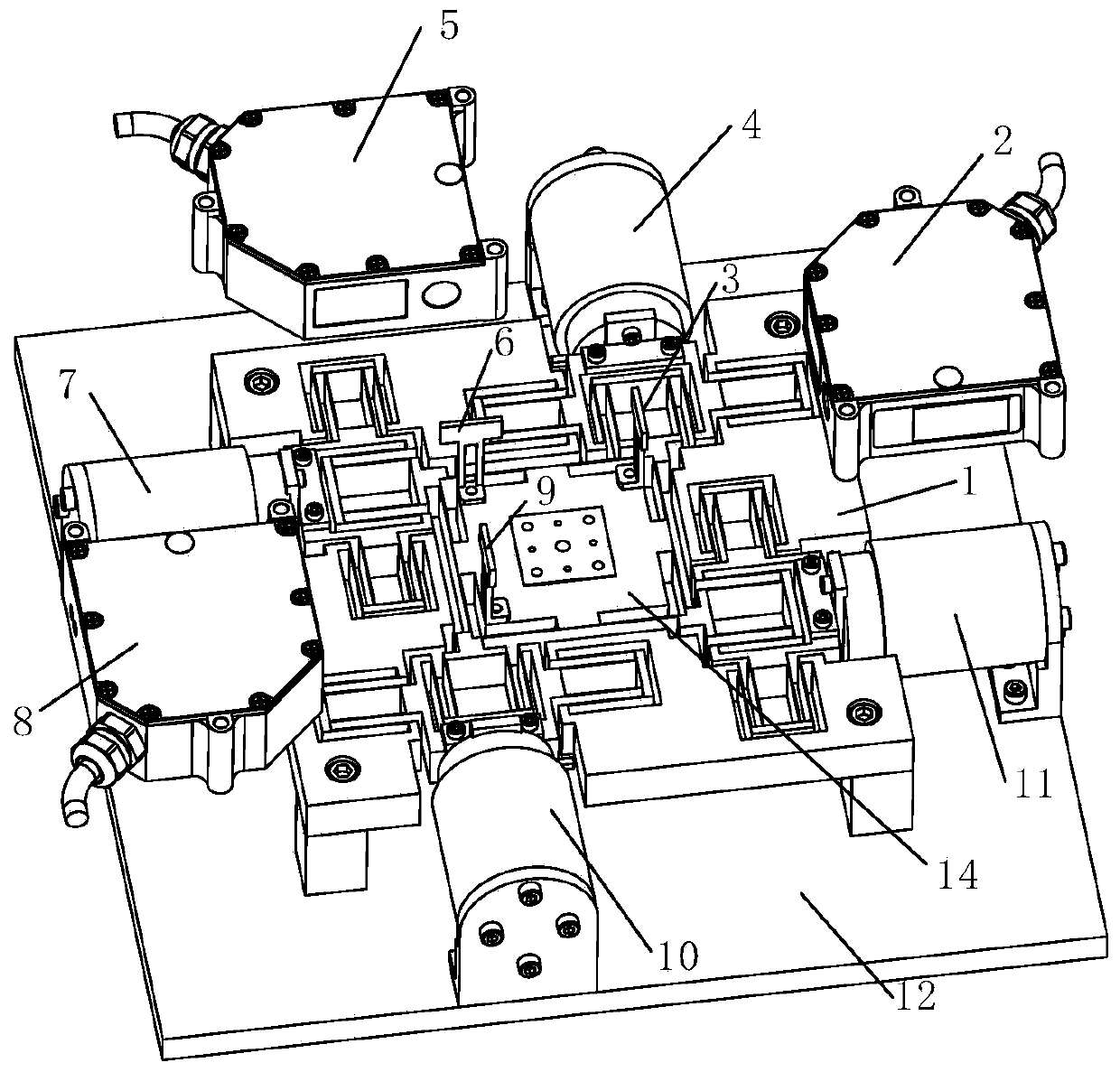
[0043] Such as figure 1 As shown, the precision positioning platform includes a base 12, a moving platform 14 located on the base 12, a transmission mechanism 1, and four voice coil motors, namely the first voice coil motor 4, the second voice coil motor 7, and the third voice coil The motor 10 and the fourth voice coil motor 11.
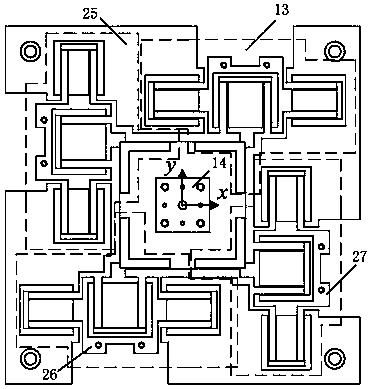
[0044] Such as figure 2 As shown, the transmission mechanism 1 includes four identical flexible branch chains, namely the first flexible branch chain 13 , the second flexible branch chain 25 , the third flexible branch chain 26 and the fourth flexible branch chain 27 . In addition, the four flexible branch chains are center-symmetrically distributed with the movi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More