

Collision drop-resistant robot and control method thereof
A technology of robots and robot hands, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as power leakage, control system disorder, motor gear cracking, etc., and achieve the effect of preventing the center of gravity from being unstable and avoiding motor damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
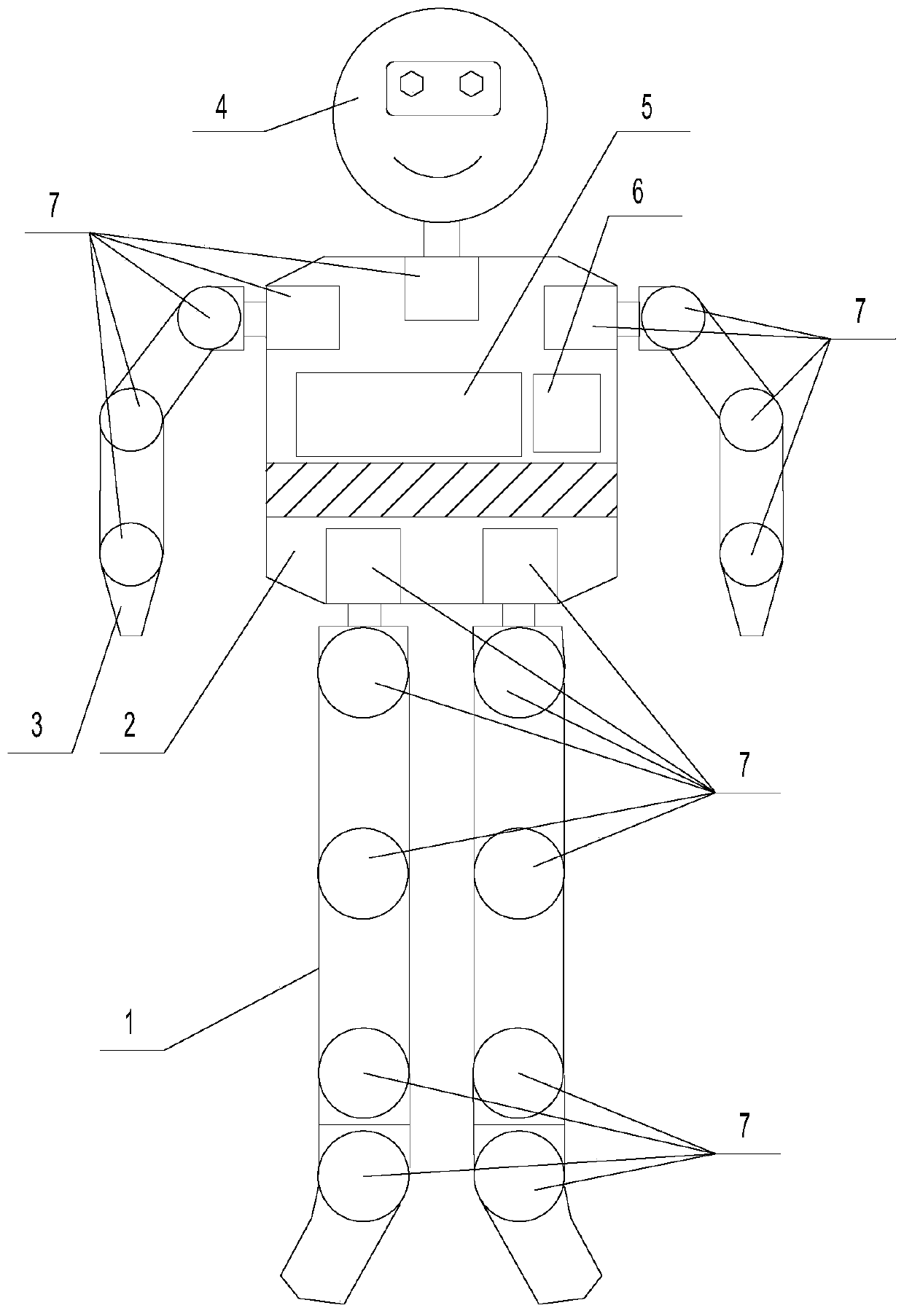
[0052] A collision-proof and drop-proof robot, including a robot leg system 1, a robot body system 2, a robot hand system 3, a robot head system 4, a control system 5, and a robot power supply system 6; the robot is a multi-degree-of-freedom humanoid robot , has 19 robot motion joints consistent with the human body motion joints, the 19 robot motion joints are respectively distributed in the robot leg system 1, the robot body system 2, and the robot hand system 3, and the 19 robot motion joints include A joint motor7. The tops of the robot leg system 1 and the robot hand system 3 are respectively connected to the output end of the robot body system 2; the bottom end of the robot head system 4 is connected to the output end of the robot body system 2; the described The control system 5 is connected with the robot power supply system 6 and is installed in the robot fuselage system 2 .
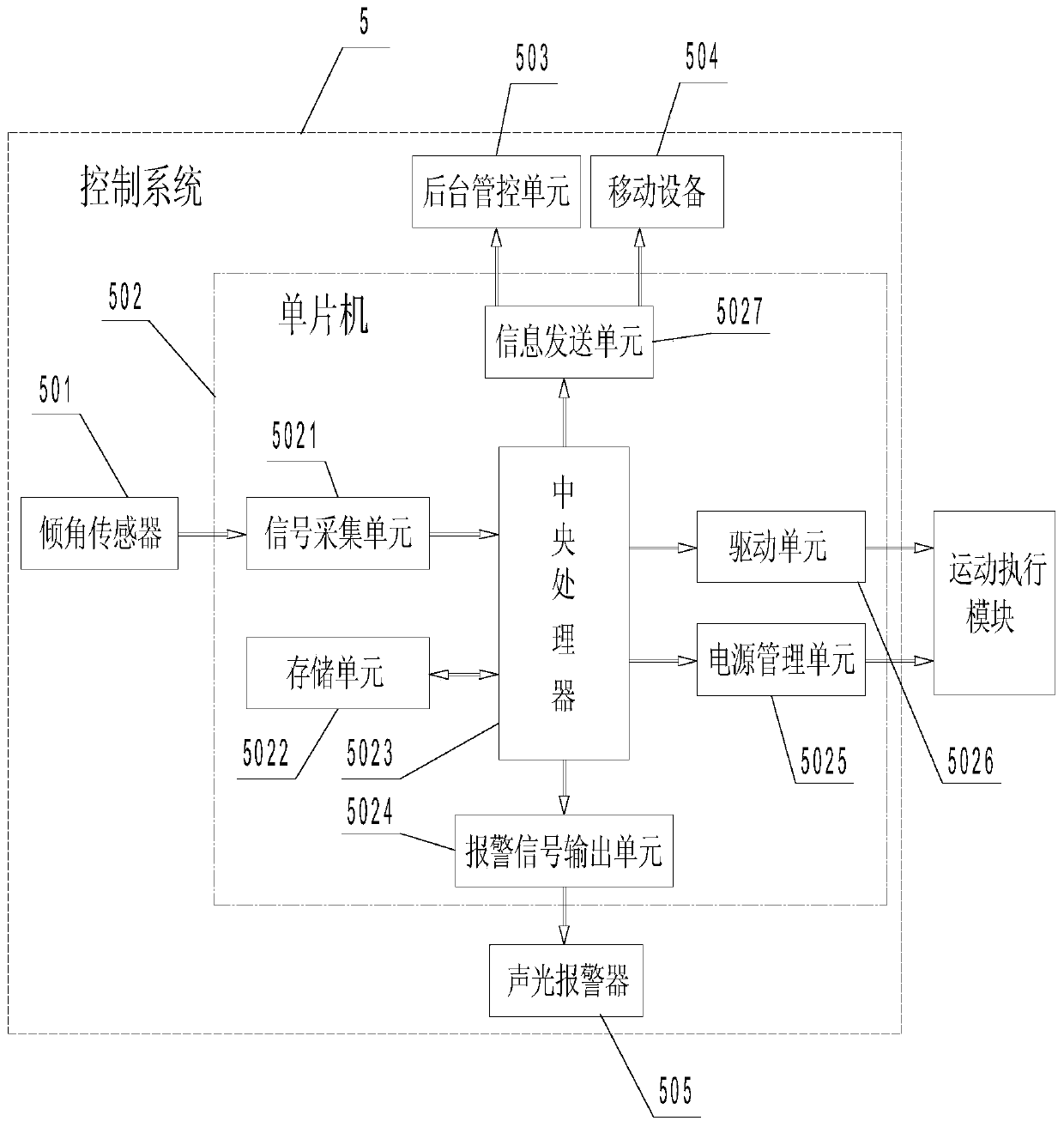
[0053] The control system 5 includes an inclination sensor 501, a single-chip microcomputer ...
Embodiment 2
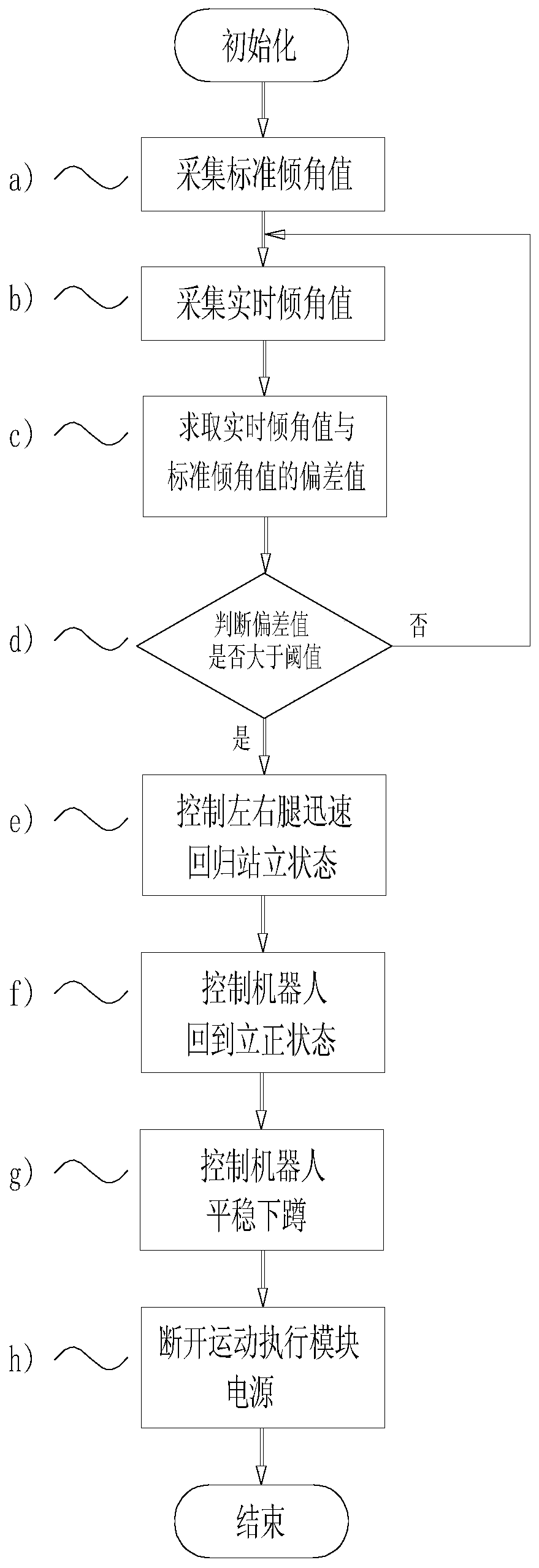
[0060] A control method for a collision-proof and fall-proof robot. The method is to install an inclination sensor 501 on each robot joint of the collision-proof robot. After the robot is installed and debugged, the standard inclination value of each robot joint is collected by the tilt sensor 501 and stored. In the storage unit 5022, during the operation of the robot, the inclination sensor 501 collects the real-time inclination value of each robot joint in real time and compares it with the standard inclination value in the storage unit 5022 in real time. When the deviation exceeds the set threshold, the motion execution module is immediately controlled to adjust the robot. Quickly return to stand at attention and squat, then cut off the power supply of the motion execution module through the power management unit 5025, the robot stops and remains in the squatting state. When the deviation exceeds the set threshold, the fault information including picture information, positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More