

Response type robust control method for four-foot robot under load sudden changes based on ZMP theory
A quadruped robot, load mutation technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of no control method, complex robust control problems, affecting the walking stability of robots, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] A reactive robust control method for a quadruped robot based on the Zero Moment Point (ZMP) theory under a sudden load change. The specific steps are as follows:
[0080] Step 1. Establish a complete dynamic model of the quadruped robot with disturbance items;
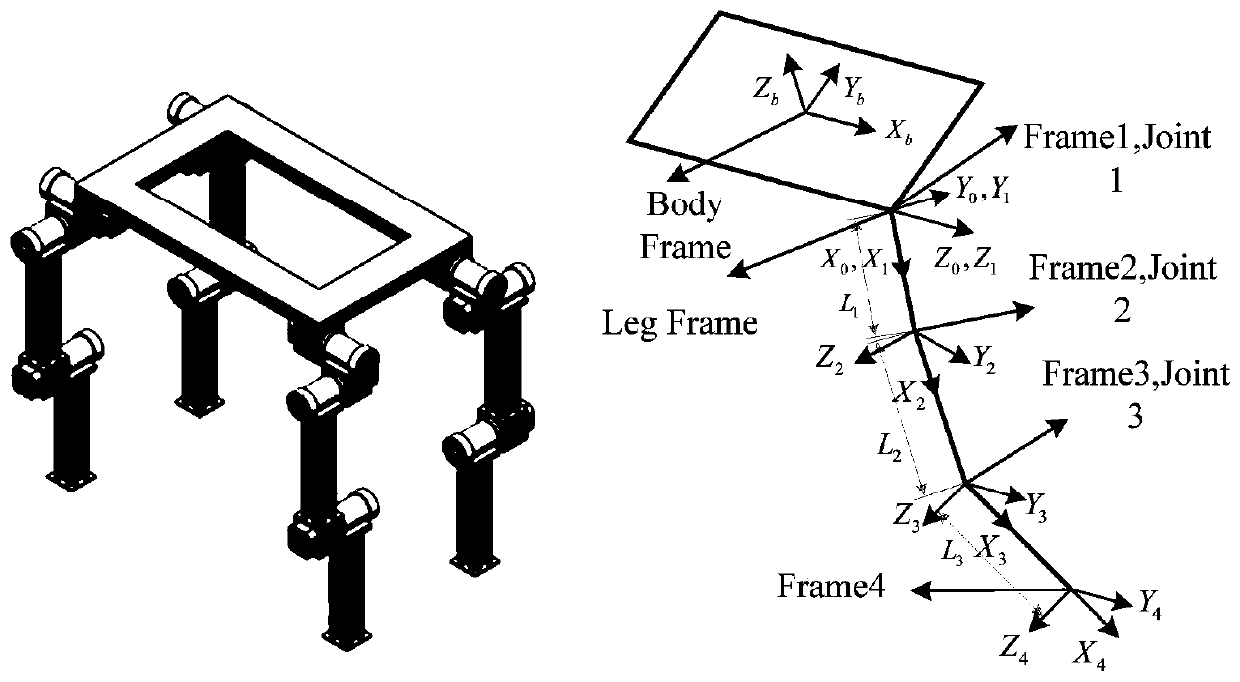
[0081] Such as figure 1 , Considering that each leg of a quadruped robot has three degrees of freedom, the external force disturbance that the robot receives when the load is suddenly loaded can be partially converted to the disturbance moment on the joint, the i-th leg with disturbance term (i=1,... The kinetic model of k) can be described as:
[0082]
[0083] among them, Is the joint angle vector, Is a symmetric positive semi-definite inertia matrix, Is the centripetal force and Coriolis force, Is the gravity term, Is the joint torque, Is the disturbing moment, Is the Jacobian matrix of foot contact force, Is the contact force vector between the foot and the ground, Is the Jacobian matrix from the coupling...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More