

Few-groove multi-pole permanent magnet fault-tolerant rim propulsion motor
A technology of permanent magnet fault tolerance and rim propulsion, applied in the direction of magnetic circuits, electromechanical devices, electrical components, etc., can solve the problems of increasing production cycle, etc., and achieve the effect of improving operating performance, large slot width, and large winding utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
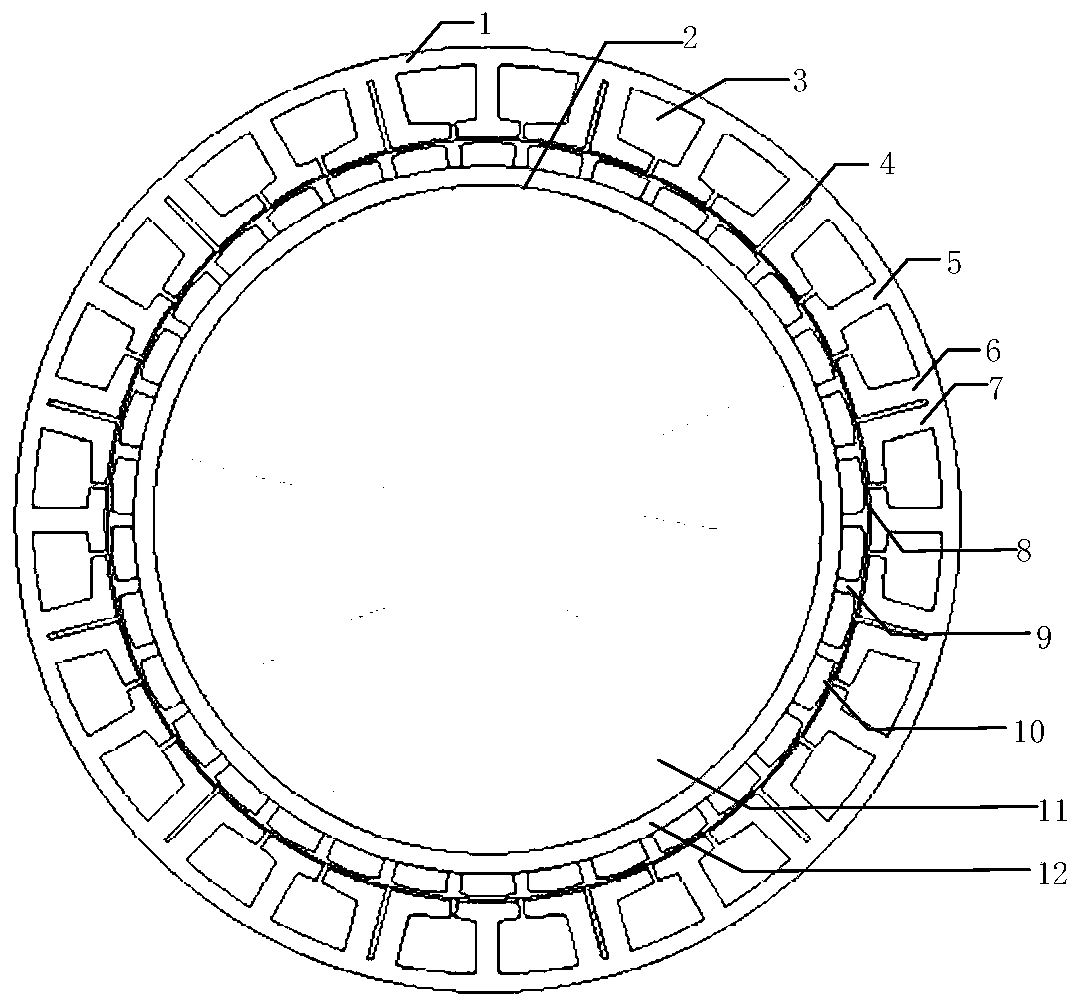
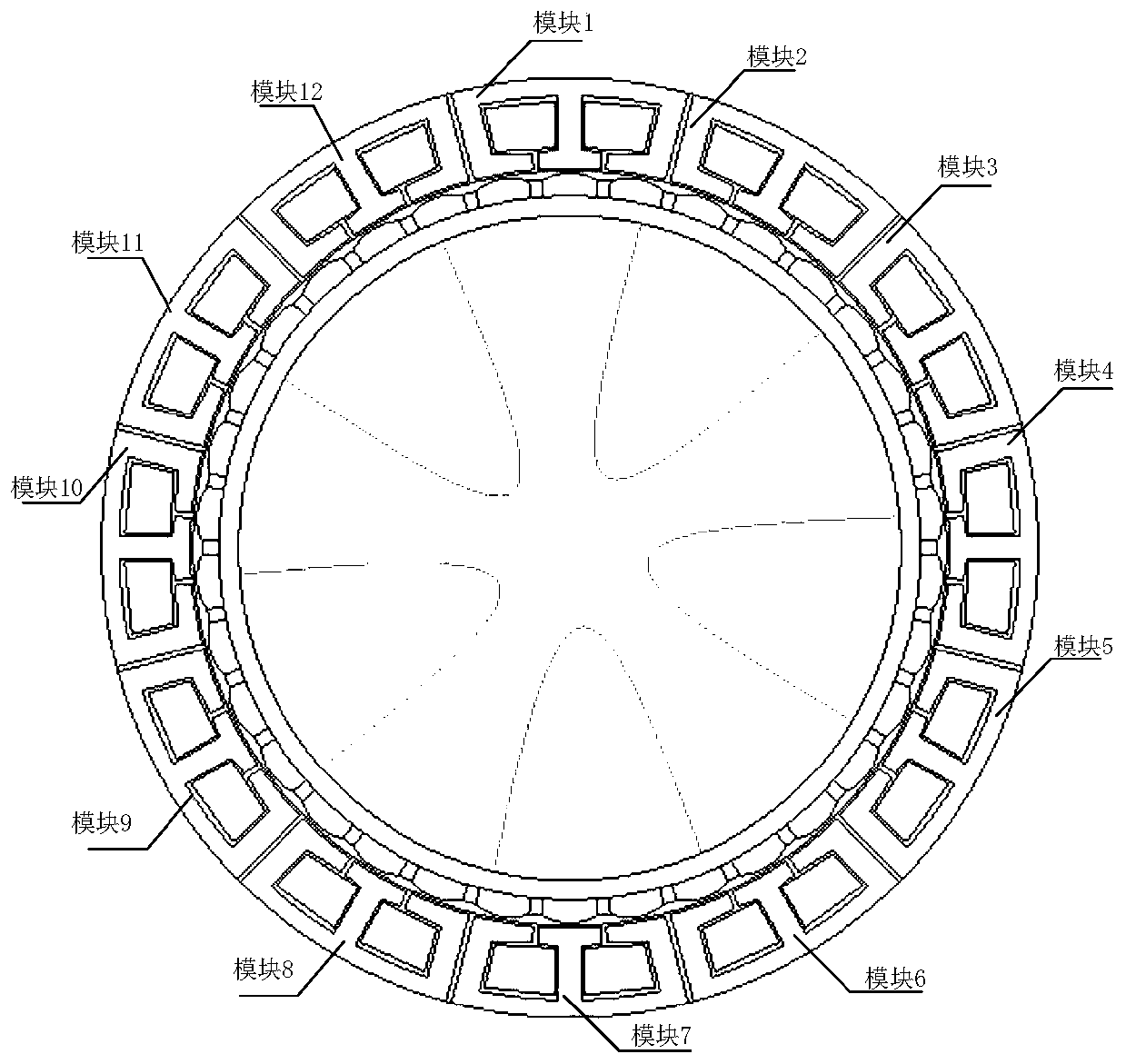
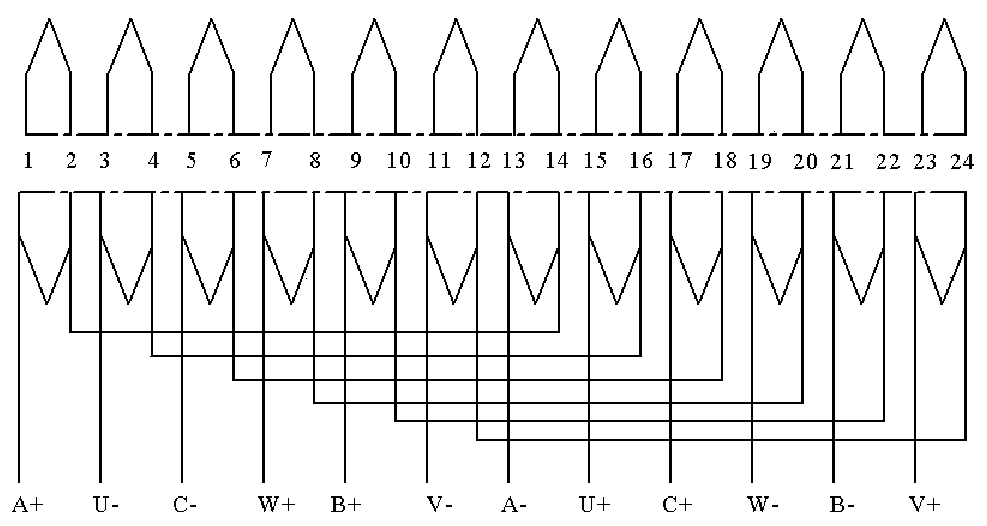
[0022] figure 1 For Example 1, figure 2 For embodiment 2; figure 2 The stator is divided to form a modular structure for easy maintenance. Such as figure 1 As shown, the less-slot multi-pole permanent magnet fault-tolerant rim propulsion motor consists of a stator and a rotor. The stator includes: winding slots 3, isolation slots 4, isolation teeth 1, isolation teeth 2, and armature teeth 5. The windings of the few-slot multi-pole permanent magnet fault-tolerant rim propulsion motor are embedded in the winding slots, which is a single-layer centralized winding structure. The windings only surround the armature teeth, and the winding distribution is as follows: image 3 shown.
Embodiment approach 2
[0023] Wherein the spacer tooth 1, the spacer tooth 2, and the armature tooth 5 have the same width of the teeth, and the same width of the pole shoe. The width of the isolation groove is adjustable, and the preferred width is to reduce the cogging torque ripple. The isolation tank is filled with non-magnetic, anti-corrosion and heat-insulating materials. Increased magnetic isolation and thermal isolation between phases. Embodiment 2 The isolation slot divides the stator to form a modular structure.
[0024] Further, the rotor includes: a rotor yoke 12 , a permanent magnet 10 , an anti-corrosion protection layer 9 and a protection sleeve 8 . The rotor yoke 12 is an integral steel structure without punching, and the propeller 11 is directly welded on the inner diameter of the rotor. The permanent magnet 10 is a surface-mounted permanent magnet or a Halbach array structure with centrifugal height. The permanent magnet 10 is filled with anti-corrosion material, and the anti-co...
Embodiment 1
[0026] The structural parameters of Embodiment 1 are shown in Table 1, and the comparison structure of the 36-slot 30-pole permanent magnet fault-tolerant motor is as follows Figure 4 As shown, the structural parameters are shown in Table 2:
[0027] Table 1 Embodiment 1 Structural parameters
[0028]
[0029]
[0030] Table 2 Structural parameters of 36 slots and 30 poles comparison structure
[0031]
[0032] Embodiment 1 has a larger winding coefficient of 0.996, and the winding coefficient of the comparative structure is 0.966. Embodiment 1 No-load counter electromotive force such as Figure 5 As shown, the no-load back electromotive force of the comparison structure is as Image 6 shown. It can be seen that the no-load back electromotive force of embodiment 1 is not much different from that of the comparison structure, and the utilization rate of the winding is basically unchanged.
[0033] Embodiment 1 can effectively reduce cogging torque ripple, and embo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More