

Brushless direct current motor PID speed regulation method based on genetic neural network
A technology of genetic neural network and brush DC motor, applied in the direction of AC motor control, electrical components, control purpose model/simulation, etc., can solve the slow convergence speed of neural network algorithm, the contradiction of the scale of application examples, and affect the use of brushless DC motor And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
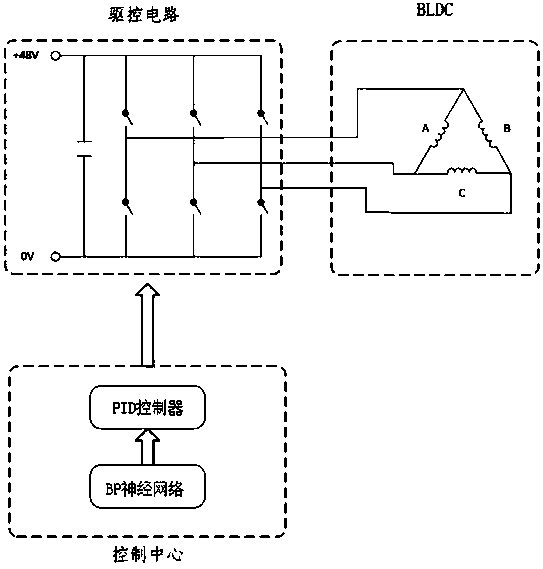
[0070] Embodiment 1: a kind of brushless DC motor PID speed regulation method based on genetic neural network, such as figure 1 As shown, it includes BP neural network, PID controller and brushless DC motor. The TMS320F28335 digital signal processor used in the shown PID controller has a high-speed processing capability of 150MHz, a 32-bit floating-point processing unit, and 6 DMA channels. Support ADC, McBSP and EMIF, with up to 18 channels of PWM output, of which 6 channels are TI's unique higher-precision PWM output (HRPWM), 12-bit 16-channel ADC; the drive control of the brushless DC motor The system is a drive control circuit, connected to the 0V terminal and the 48V terminal; the input terminal of the PID controller is connected to the output terminal of the BP neural network, and the output terminal of the PID controller is connected to the brushless DC motor; the genetic algorithm is used to optimize the BP The weight and threshold of the neural network, and then learn...
Embodiment 2
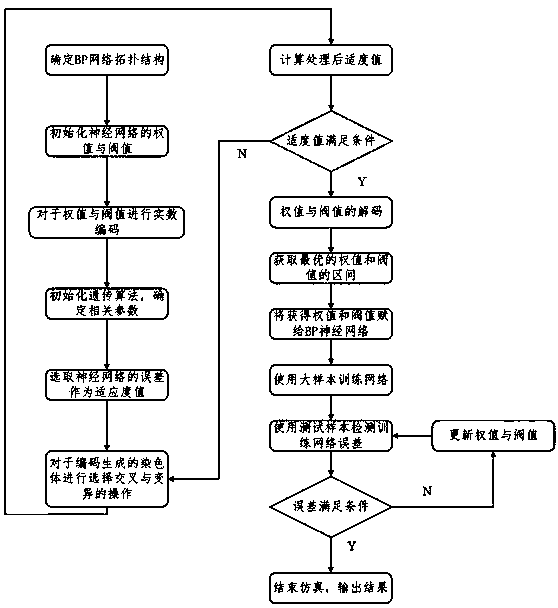
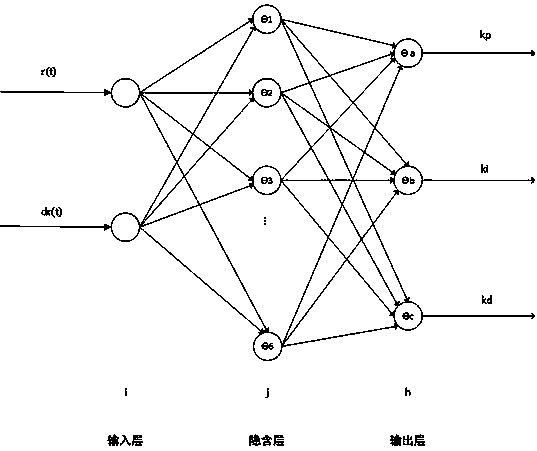
[0071] Embodiment 2: on the basis of embodiment 1, as figure 2 As shown, first determine the topology of the BP network, such as image 3 As shown, the number of layers of the BP neural network is three layers, including an input layer, a hidden layer and an output layer; according to the number of hidden nodes and the input layer Nodes and Output Nodes Approximate relationship: , set the number of nodes in the input layer is 2, the number of nodes in the hidden layer is 6, the number of nodes in the output layer is 3; initialize the weights and thresholds of the BP neural network, and encode the weights and thresholds in real numbers, and the threshold of the hidden layer is , the threshold of the output layer is , the weight from the input layer to the hidden layer is , the weight from the hidden layer to the output layer is , where {0≤ ≤ 2, 0≤ ≤6, 0≤ ≤ 3; , , ∈ }.
[0072] The weight and threshold of BP neural network are optimized by gene...
Embodiment 3
[0095] Embodiment 3: on the basis of embodiment 2, as Figure 4 and Figure 5 As shown, the specific process of the BP neural network learning the three control parameters of the PID controller through samples is as follows:
[0096] S1: Preprocessing of input samples: sample data obtained by sampling, the sample data is the deviation value of a given speed and the rate of change of the deviation value , and then use the function MAPMINMAX function in MATLAB to perform normalization, so that the value of the sample data is between [-1,1]:
[0097] Input vector sample: ,
[0098] Desired output: ;
[0099] After genetic algorithm optimization, the search space is used as the initial good weight and , is the connection weight of the input layer and the hidden layer of the BP neural network, and is the connection weight of the hidden layer and the output layer of the BP neural network
[0100] S2: Forward propagation of BP neural network: Import the normalized da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More