

Offline programming postposition code conversion method and double-robot collaborative intelligent manufacturing system and method based on offline programming postposition code conversion same
A code conversion and off-line programming technology, applied in the field of dual-robot collaborative intelligent manufacturing system, can solve the problems of lack of dual-robot simulation and collaborative control functions, inability to coordinate trajectory planning and offline programming of dual-robots, and inability to realize efficient collaborative intelligent manufacturing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
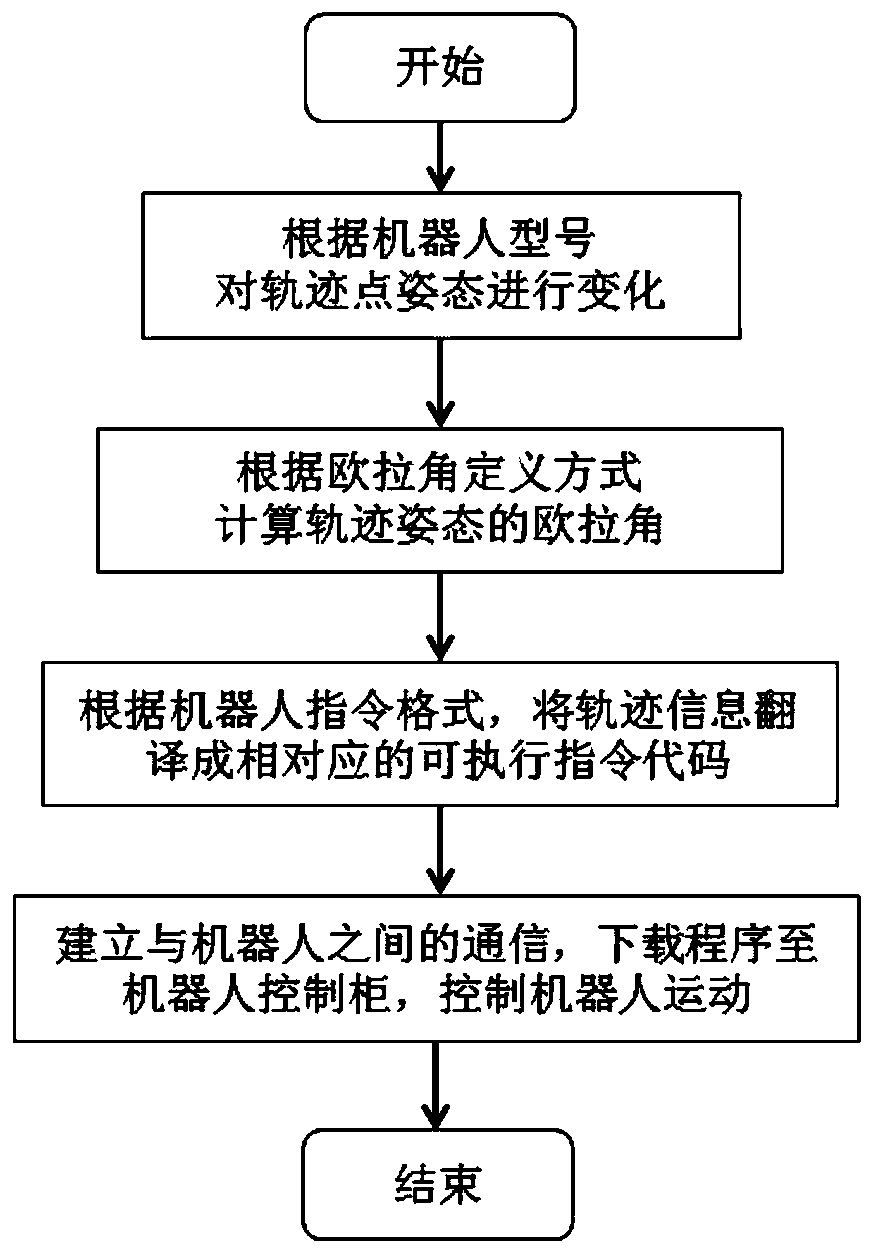
[0056] refer to figure 1 , post-code conversion after offline programming is to perform corresponding Euler angle transformation on the trajectory of the simulated robot and convert it into a corresponding instruction set according to the actual robot brand model used, so as to control the physical robot to complete the processing; and then perform post-code Editing and communication, that is, perform command editing, modification operations, file access on the post-code, and establish communication with multiple robots, so that the collaborative intelligent manufacturing in the simulation environment can be reproduced in the actual working environment.
[0057] like figure 1 As shown, combined with the example of workpiece processing, the post-code conversion of the present invention adopts the trajectory attitude information conversion method...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More