

Mechanical arm intelligent control system, method and device based on edge computing
An intelligent control system and edge computing technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effects of safety assurance, bandwidth avoidance, and convenient management
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
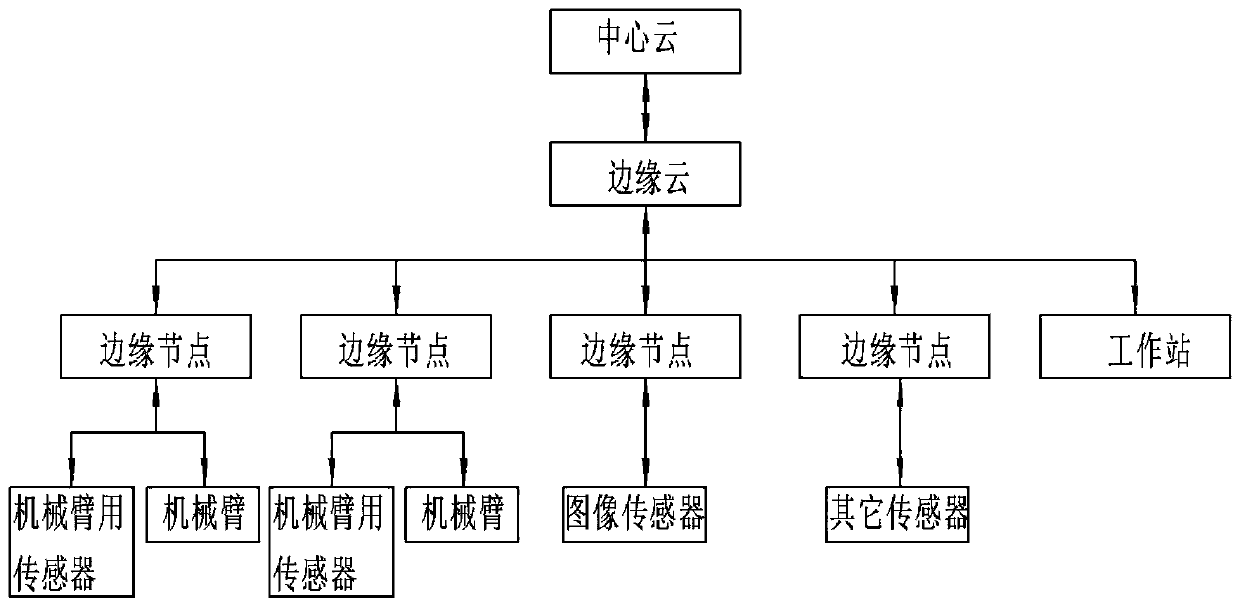
[0053] The first aspect of the present invention provides an intelligent control system of a manipulator based on edge computing, including a manipulator, a sensor, a central cloud, an edge cloud, and an edge node; wherein, the central cloud is provided with control law generation algorithm files, image processing Algorithm files, 3D model generation algorithm files, trajectory planning algorithm files, algorithm file library of inverse kinematics model generation algorithm files of the robotic arm, technically support the edge cloud to complete various tasks necessary for intelligent control.
[0054] The edge cloud uses the algorithm files pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More