Dynamic positioning model test control method and system based on wind flow feedforward
A technology of dynamic positioning and control method, applied in ship parts, ships, transportation and packaging, etc., can solve the problems of difficult data and information, small integral coefficient value, and the system cannot meet the required positioning accuracy, and achieves high reference value, The effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
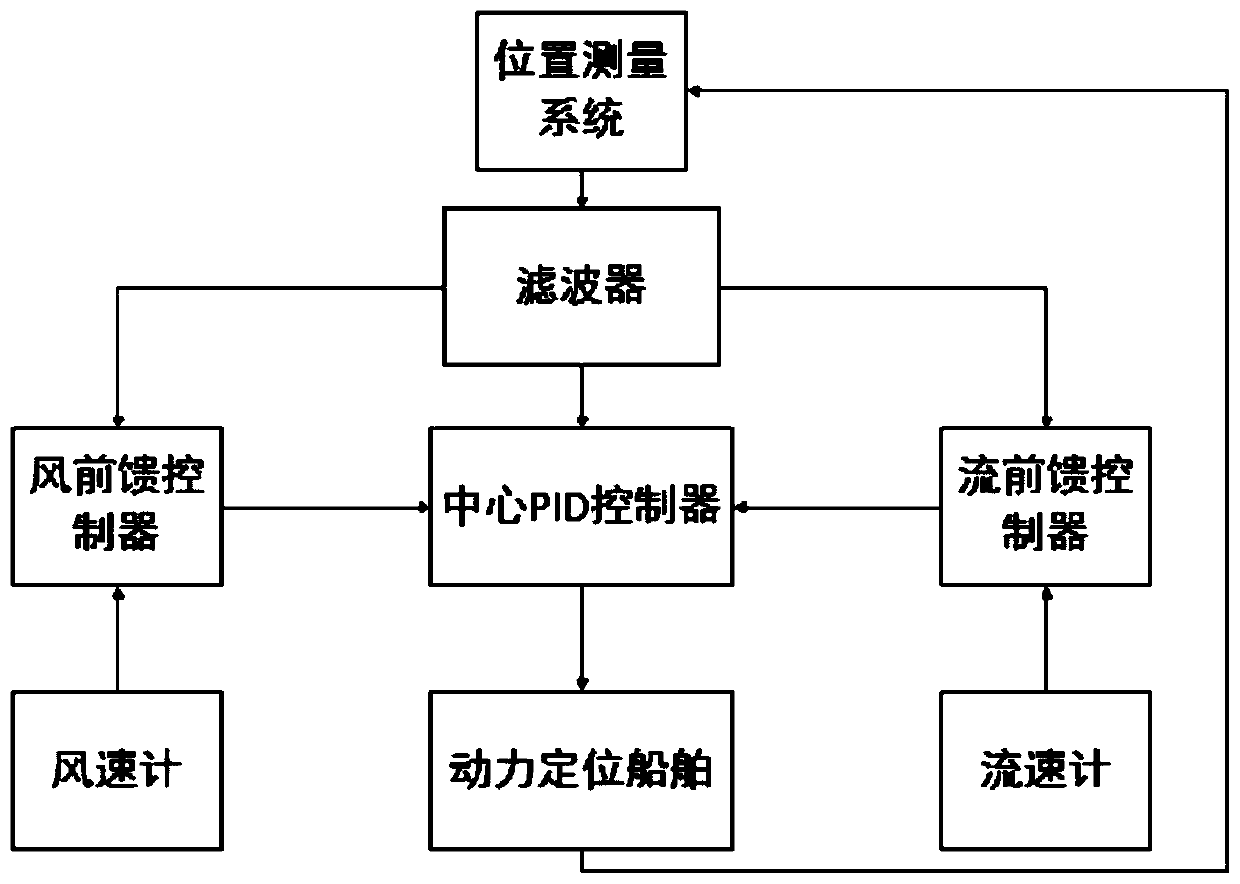
[0019] This embodiment, as a comparative example, relates to the prior art. Assuming that the ship is positioned at the origin, for the traditional control method, the position of the ship at this time is measured by the position measurement system, and the position information is sent to the filter and estimated by the filter. This information is further sent to the central PID controller to calculate the required control force τ, and finally through the thrust distribution module, the thrust is distributed to each thruster of the dynamic positioning ship. control can be expressed as
[0020] τ=k p *x+k d *v+k i *∫x dt
[0021] This is a pure feedback control method, which must have an offset before force feedback. Although there is an integral link, in order to ensure the stability of the system, the value of the integral coefficient is usually very small. In actual control, it is easy to be disturbed by the outside to produce a large offset, and it oscillates back and f...
Embodiment 2
[0022] Embodiment two: Embodiment two is the embodiment of the technical solution of the present invention.
[0023] For the control method of the present invention, we measure and obtain the corresponding wind speed and flow speed through an anemometer and a current meter installed near the center of gravity of the ship;
[0024] According to the above-water and underwater projected area of the ship under the heading angle, the wind force and current force suffered by the ship at this time are estimated, and they are added to the control force τ in advance:
[0025] τ=k p *x+k d *v+k i *∫x dt+F 风前馈 +F 流前馈
[0026]
[0027]
[0028] In the formula, ρ is the density of gas and water, and S is the projected area above and below the waterline respectively, which can be determined according to the heading angle, which is a term in the field of ships and represents the direction of wind, wave and current, such as the heading angle 180 degrees means that it is against ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com