

Disorderly stacked workpiece grabbing system based on 3D vision and interaction method
A workpiece, 3D technology, applied in the field of 3D vision, can solve the problems of long debugging time, difficulty in large-scale promotion and application, and high learning cost for ordinary workers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
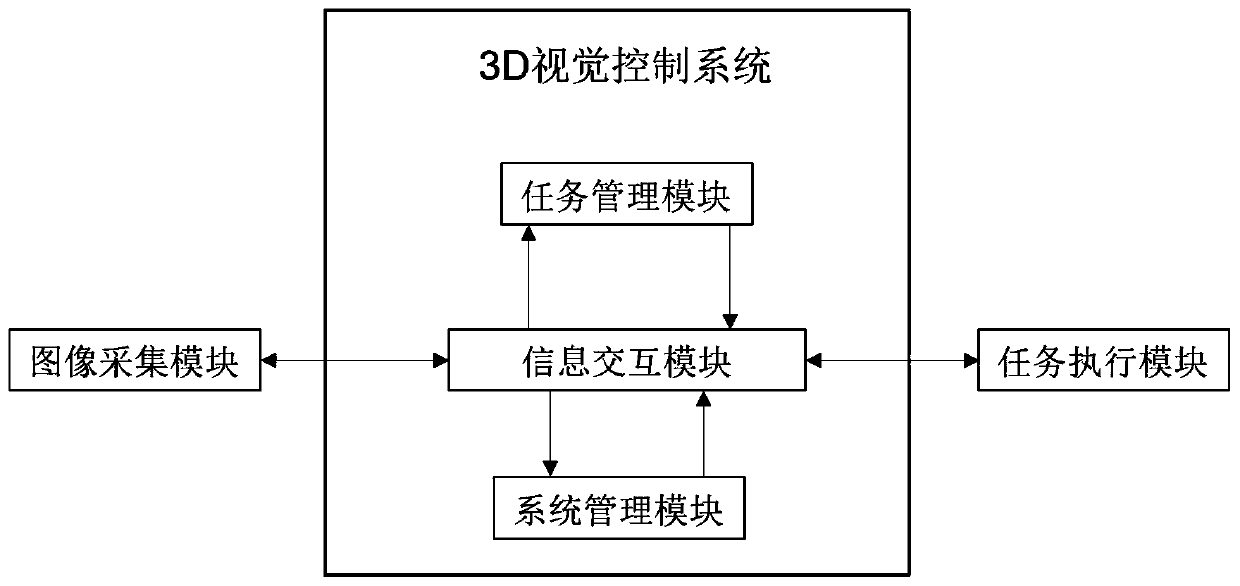
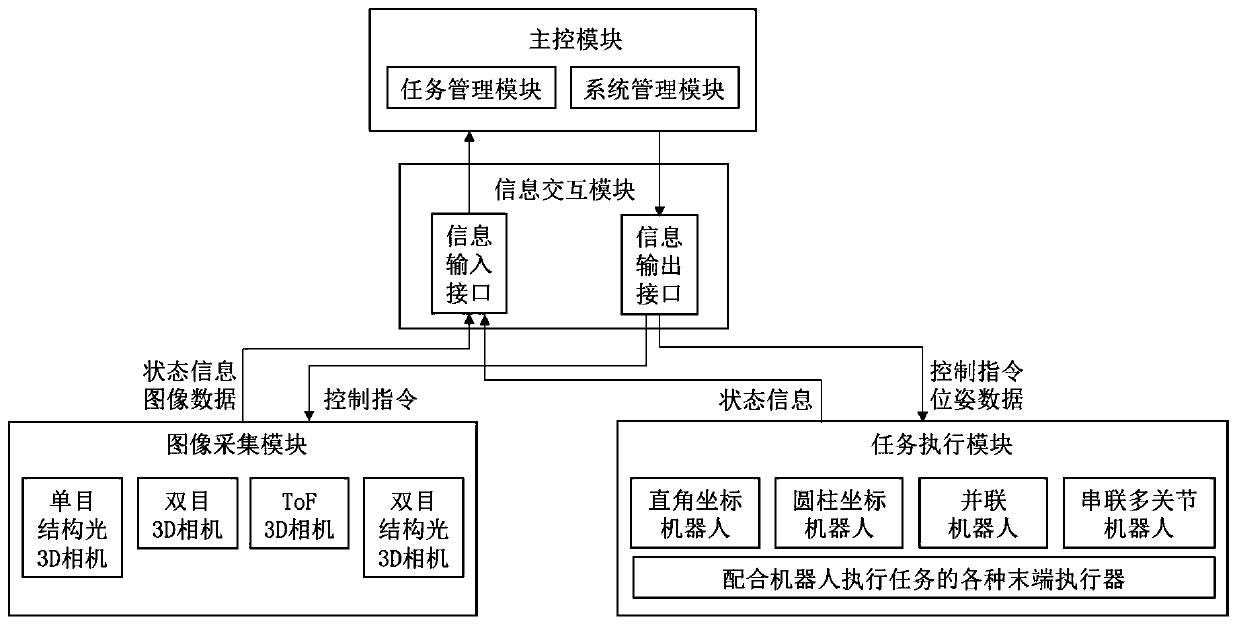
[0066] A 3D vision-based disorderly stacked workpiece grasping system is applied to the grasping and unloading of randomly placed materials in the industrial field. Specifically, by constructing a disorderly grasping task, based on the above-mentioned disorderly grasping system, it can Realize the identification and accurate grasping of workpieces. Such as figure 1 As shown, it includes task management module, information interaction module, system management module, image acquisition module and task execution module. The image acquisition module is used to obtain the depth image of the workpiece and the scene. It is essentially a different type of 3D camera. In the actual application process, different types of cameras are used according to the captured workpiece. 3D cameras such as binocular 3D cameras, ToF 3D Camera, monocular structured light 3D camera, binocular structured light 3D camera; the image acquisition module transmits the acquired depth image to the information...
Embodiment 2
[0085] Based on the streamlined and guided task creation interface provided by the task management module, according to Figure 5 The task creation step completes the creation of unordered workpiece grabbing tasks:
[0086] Step S110: Determine the workpiece to be grasped in the robot's grasping task, and establish a 3D point cloud model for the workpiece to be grasped through the 3D camera. In the actual work process, the user needs to specify the workpiece to be grasped by the robot and build a 3D point cloud of the workpiece Model; when the task is executed, the 3D point cloud model of the workpiece is used to match and identify the workpiece in the basket, and the workpiece to be grasped is placed in the center of the 3D camera field of view. The 3D vision software system triggers the 3D camera to take pictures, and the 3D camera receives the vision software system to take pictures Command and execute the camera action to obtain the depth image of the scene under the field...
Embodiment 3
[0112] Also provided is an industrial control device, which includes: a processor, a memory, and a communication module; the processor, the memory, and the communication module of the industrial control device can be connected through a bus or in other ways.
[0113] Further, the processor executes various functions and image data processing of the 3D vision system by running the 3D vision software programs, instructions and modules stored in the memory, that is, realizes the method of grasping disorderly stacked workpieces based on 3D vision; the communication module Provide hardware interface and communication protocol for data transmission between image acquisition module and task execution module;
[0114] The memory includes a storage program area and a storage data area, wherein the storage program area is used to store the operating system and corresponding application programs, such as the 3D vision control application program of this solution; the storage data area is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More