

Quasi-differential lock control system, differential rate control system and method and automobile
A technology of control system and differential lock, which is applied in the direction of control system, electric vehicle, control drive, etc., can solve the problem of lower efficiency, differential speed control that cannot be realized by differential gear and differential lock, resource consumption of rare earth shortage and mining and processing environmental issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
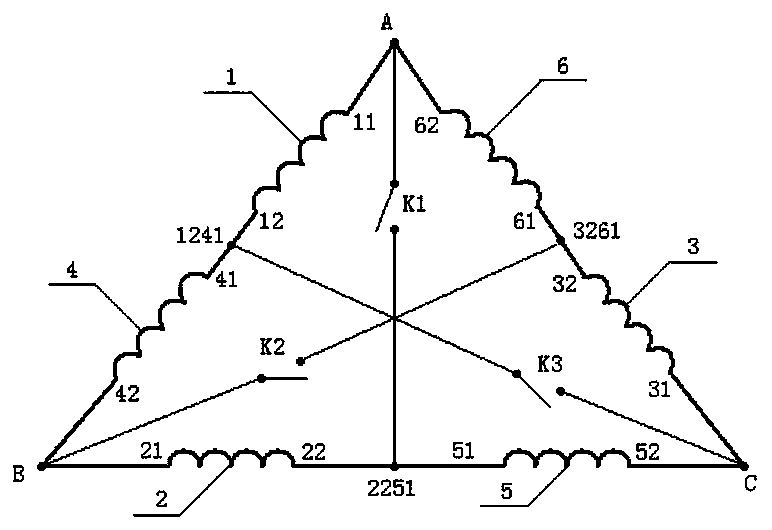
[0175] This embodiment provides a quasi-differential lock control system including two motors. Such as figure 1 As shown, it is a schematic diagram of a centerline differential lock connection method of a quasi-differential lock control system including two motors.
[0176] The two three-phase AC motors that the quasi-differential speed control system has are respectively the first motor and the second motor, and the three-phase windings that the first motor has are the first winding (1), the second winding (2) and the third winding ( 3), the first and last two terminals of the first winding (1) are respectively 11 and 12, the first and last two terminals of the second winding (2) are respectively 21 and 22, and the first and last two terminals of the third winding (3) are respectively 31 and 32, the three-phase windings of the second motor are the fourth winding (4), the fifth winding (5) and the sixth winding (6), and the first and last terminals of the fourth winding (4) ...
Embodiment 2
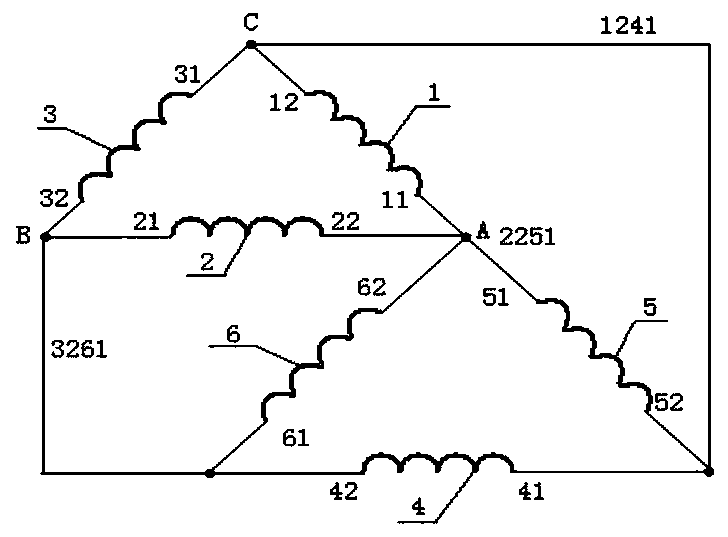
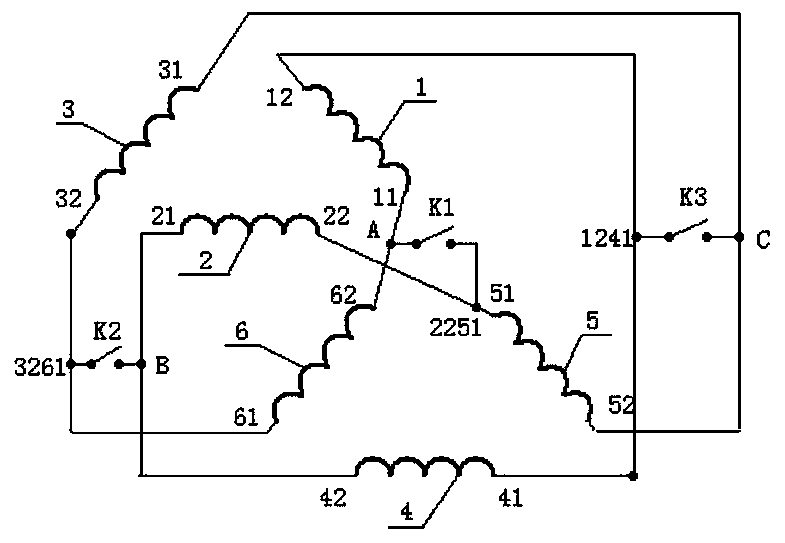
[0191] This embodiment provides a quasi-differential lock control system including three motors, such as Figure 5 and Figure 6 As shown, the three three-phase AC motors of the quasi-differential speed control system are respectively the first motor, the second motor and the third motor.
[0192] The three-phase windings of the first motor are the first winding (1), the second winding (2) and the third winding (3). The first and last terminals of the first winding are 11 and 12 respectively, and the first and last terminals of the second winding are two The terminals are 21 and 22 respectively, and the first and last terminals of the third winding are 31 and 32 respectively.
[0193] The three-phase windings of the second motor are the fourth winding (4), the fifth winding (5) and the sixth winding (6), the first and last two terminals of the fourth winding are 41 and 42 respectively, and the first and last two terminals of the fifth winding The terminals are 51 and 52 resp...
Embodiment 3
[0205] This embodiment provides a quasi-differential lock control system including four motors. Such as Figure 7 and Figure 8 As shown, the four three-phase AC motors are respectively the first motor, the second motor, the third motor and the fourth motor.
[0206] The three-phase windings of the first motor are the first winding (1), the second winding (2) and the third winding (3). The first and last terminals of the first winding are 11 and 12 respectively, and the first and last terminals of the second winding are two The terminals are 21 and 22 respectively, and the first and last terminals of the third winding are 31 and 32 respectively.
[0207] The three-phase windings of the second motor are the fourth winding (4), the fifth winding (5) and the sixth winding (6), the first and last two terminals of the fourth winding are 41 and 42 respectively, and the first and last two terminals of the fifth winding The terminals are 51 and 52 respectively, and the first and la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More