

Posture adjusting method of random parallel three-coordinate positioner group
A three-coordinate locator and three-coordinate technology, which is applied in the directions of instruments, measuring devices, aircraft assembly, etc., can solve the problems of small scope of application, long manufacturing cycle of parallel parallel attitude adjustment equipment, and long manufacturing cycle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
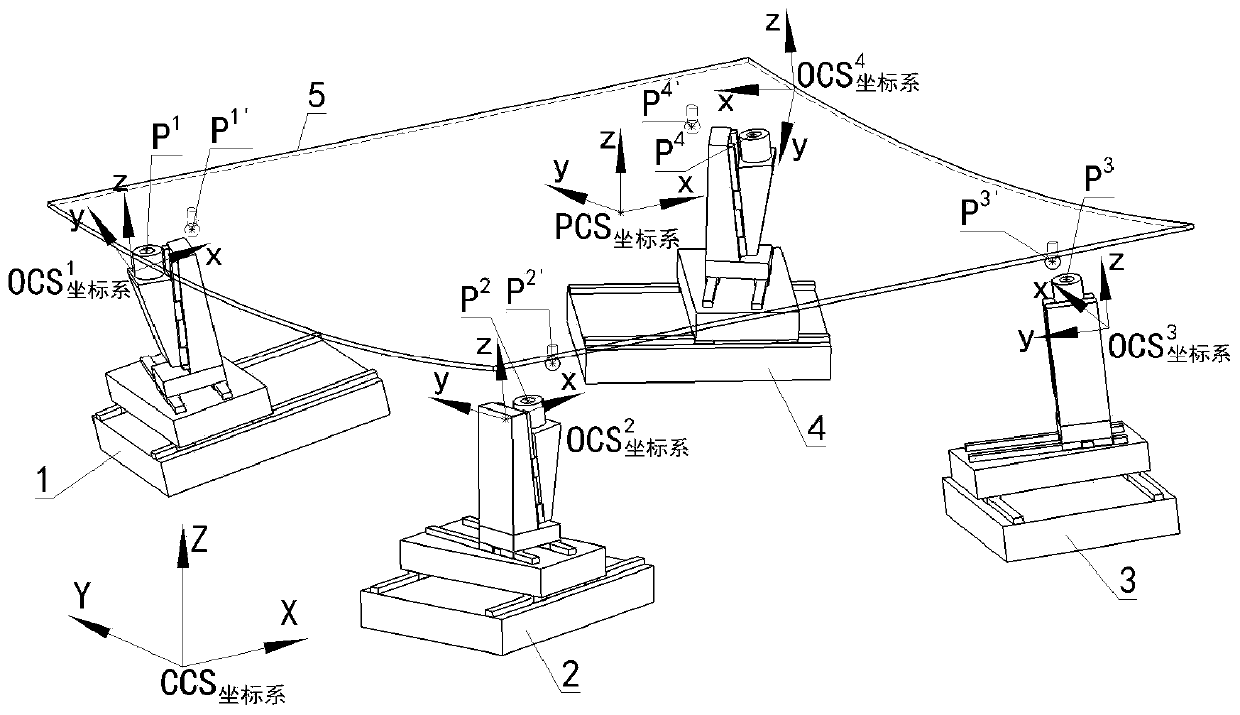
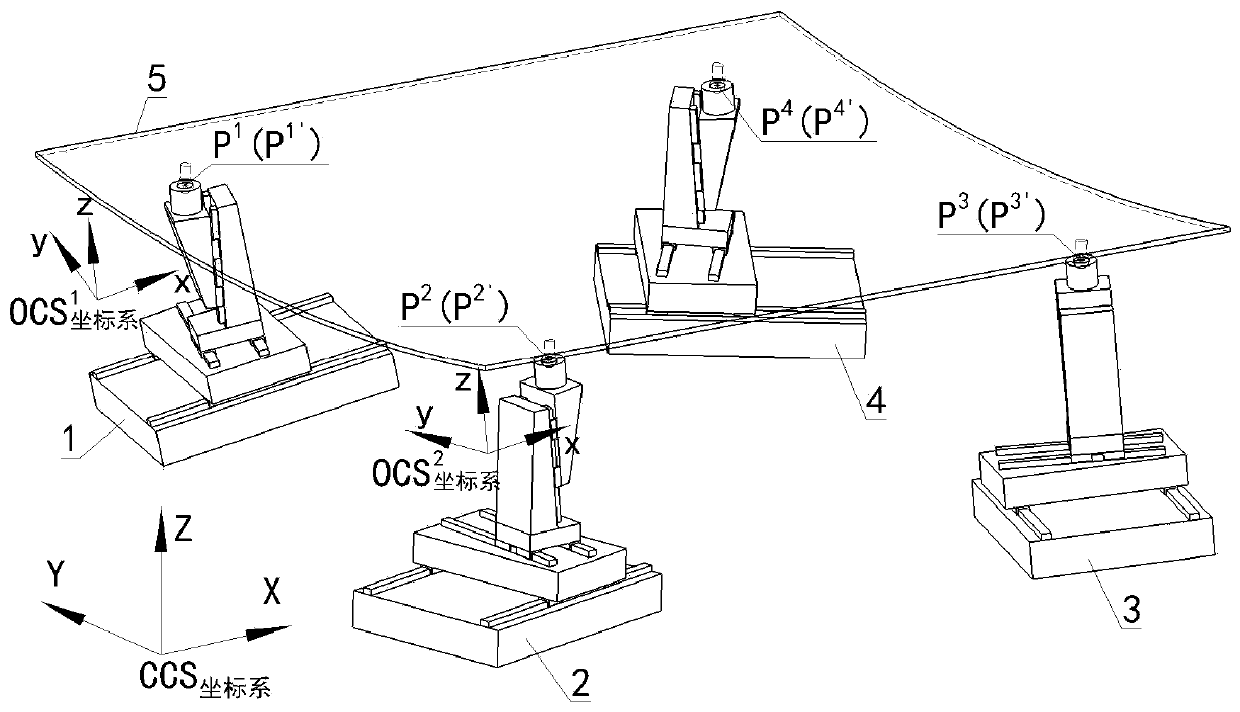
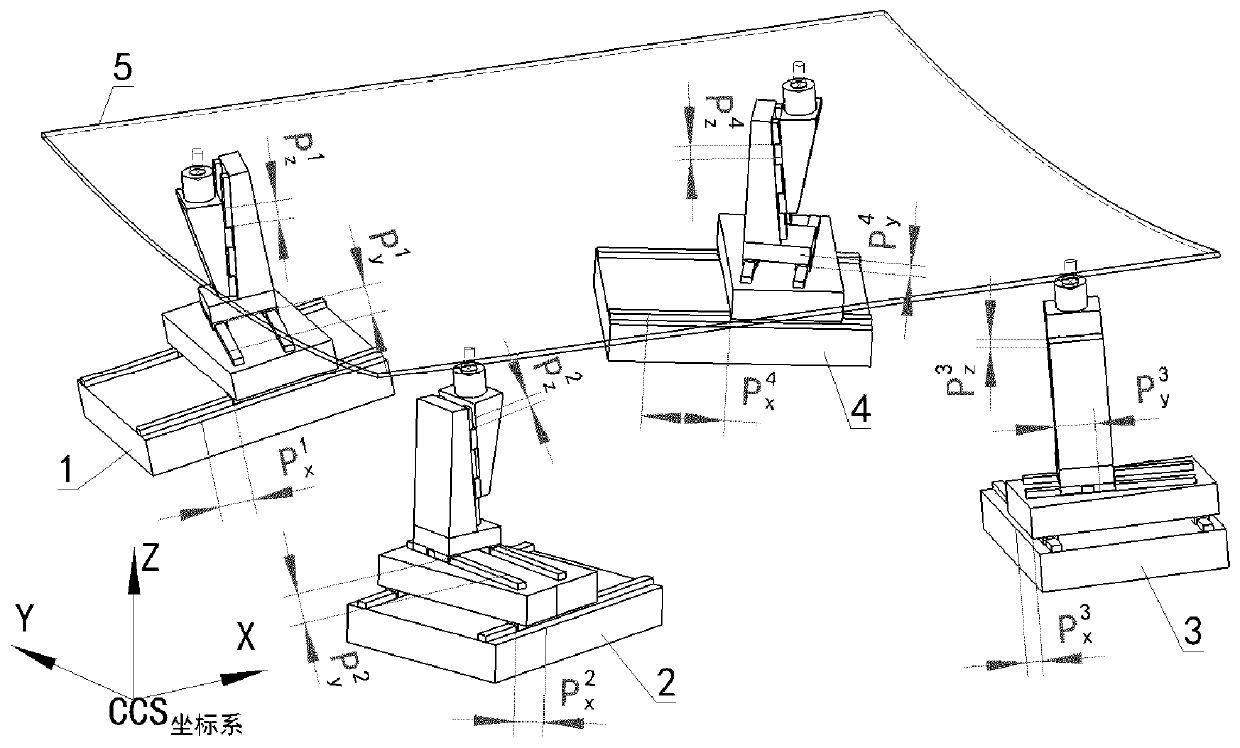
[0058] see figure 1 , figure 2 , image 3 As shown, the position-dependent parallel three-coordinate positioner group consists of three-coordinate position-dependent series positioner I, three-coordinate position-dependent series positioner II, three-coordinates position-dependent series positioner III, and three-coordinates position-dependent series positioner IV (in this implementation The scheme takes four three-coordinate positioners connected in parallel as an example. In fact, three or more three-coordinate positioners can be connected in parallel. The two can be connected in parallel, intersecting and parallel, or staggered in parallel. After placement, fix the three-coordinate serial positioner with the ground, that is, the coordinate system of each three-coordinate series positioner (i∈[1 4]) and reference coordinate system CCS 坐标系 relationship is fixed.
[0059] see figure 1 , figure 2 , image 3 As shown, the three-coordinate series positioner is sequentia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More