

Laser radar and camera combined calibration method based on mobile calibration plate
A lidar and joint calibration technology, applied in image data processing, complex mathematical operations, instruments, etc., to achieve the effect of simple operation, high precision, and simple calibration method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with accompanying drawing.
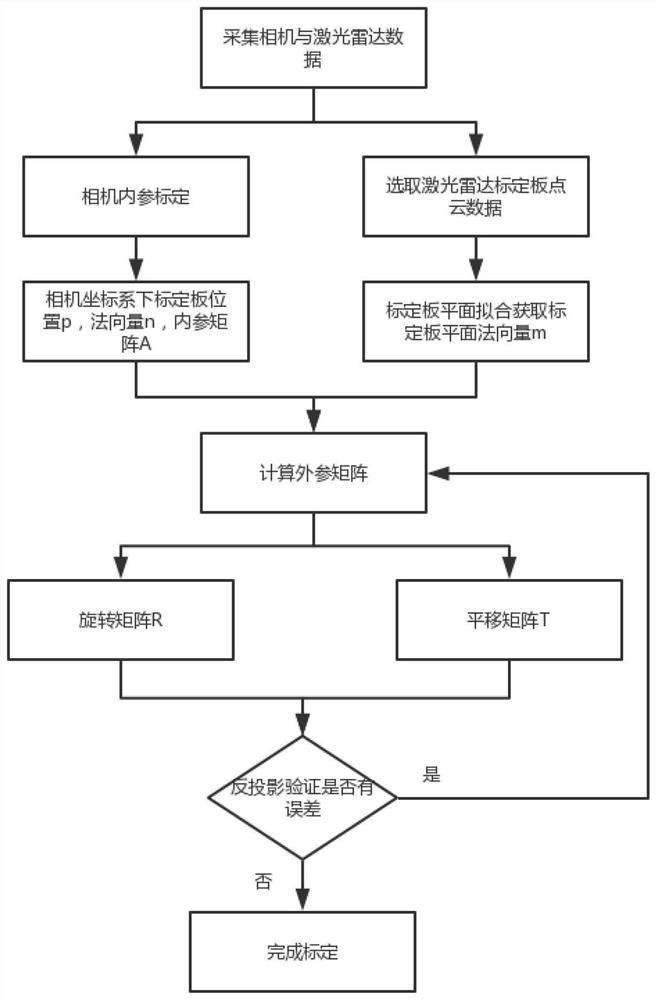
[0039] The joint calibration scheme of lidar and camera based on the mobile calibration board proposed by the present invention first calculates the internal parameters of the calibration by calculating the different poses of the calibration board, then obtains the normal vector for the point cloud data fitting plane of the corresponding selected lidar calibration board, and then obtains the normal vector through Solve the equation to calculate the calibration external parameters, and finally complete the calibration. Such as figure 1 As shown, the specific process is as follows
[0040] Step 1 Use a black and white checkerboard calibration board to simultaneously record lidar and camera data in a relatively open outdoor area. When recording data, the checkerboard should select the three vertical distances of near point, middle point, and far point, and the left side under...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More