

Robot preset formation control method
A control method and robot technology, applied in the field of robots, can solve problems such as low control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] The specific technical solutions of the present invention are described in conjunction with the examples.
[0087] Process flow of the present invention such as Figure 5 As shown, the specific process is:
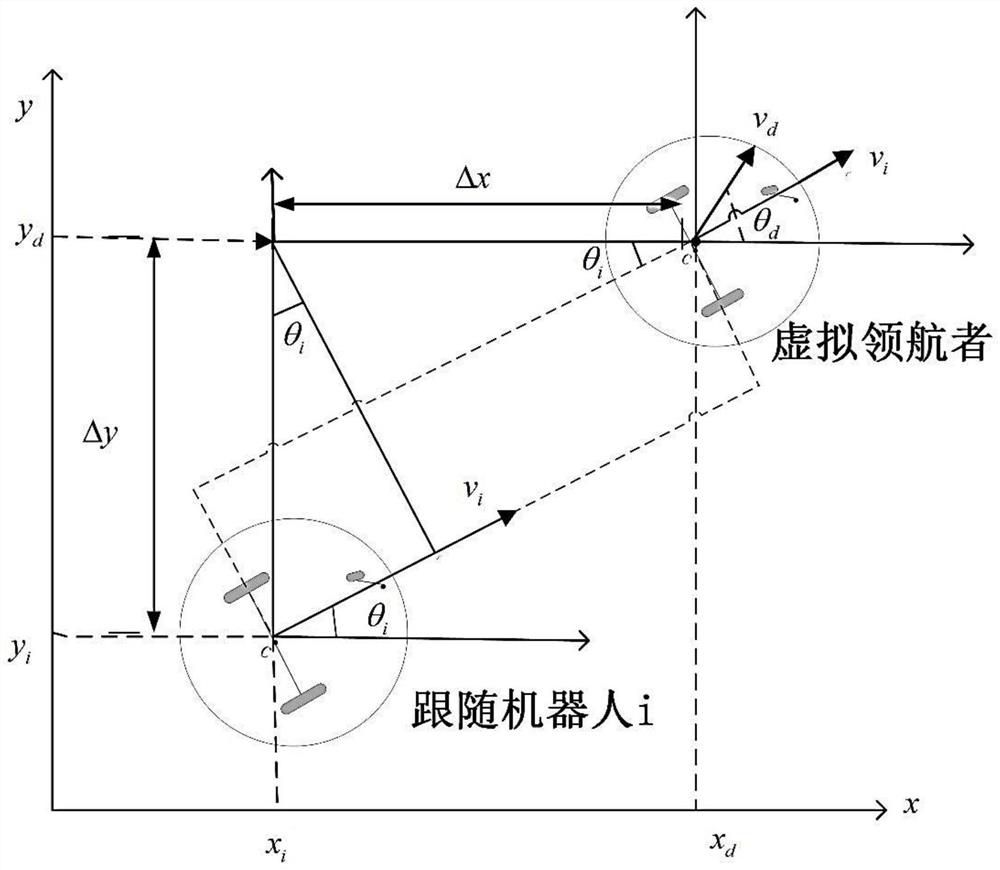
[0088] Step (1), establishing a kinematics-dynamics model and a virtual pilot-following kinematics model for the wheeled mobile robot Kobuki:
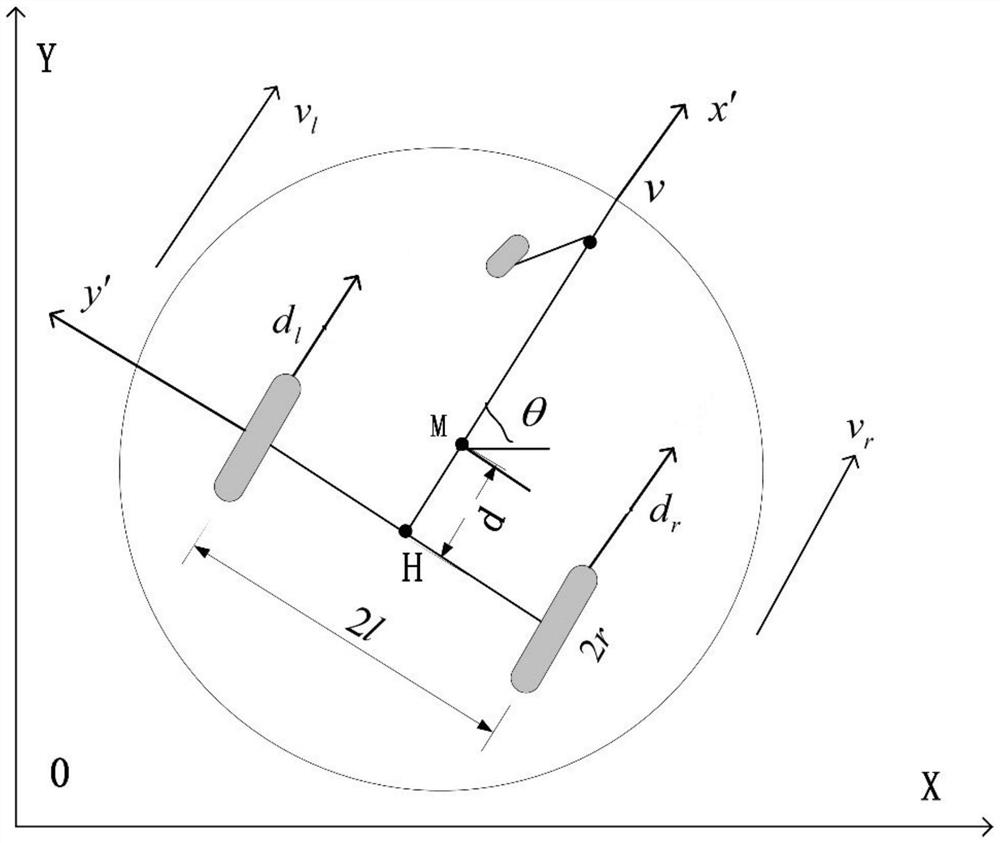
[0089] A. Kinematic-dynamic model of mobile robot:
[0090] Depend on figure 1 The dynamic equation of the robot can be obtained:
[0091]
[0092] Among them, j is the moment of inertia of the robot rotating around the central axis, M is the mass of the robot, J is the moment of inertia of the wheel, c is the viscous damping coefficient, k is the amplification factor, u l , u r is the input torque of the left and right wheels, r is the radius of the wheel, d l 、d r are the disturbance moments of the left and right wheels of the robot system, l is 1 / 2 of the distance between the centerlines of the left and right wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More