

Hand exoskeleton rehabilitation training device and method based on surface electromyogram signals
A technology of myoelectric signal and rehabilitation training, applied in pattern recognition in signals, neural learning methods, computer components, etc., can solve problems such as increased inconvenience, increased feature redundancy, and time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. The specific embodiments described here are only used to explain the present invention, not to limit the invention.
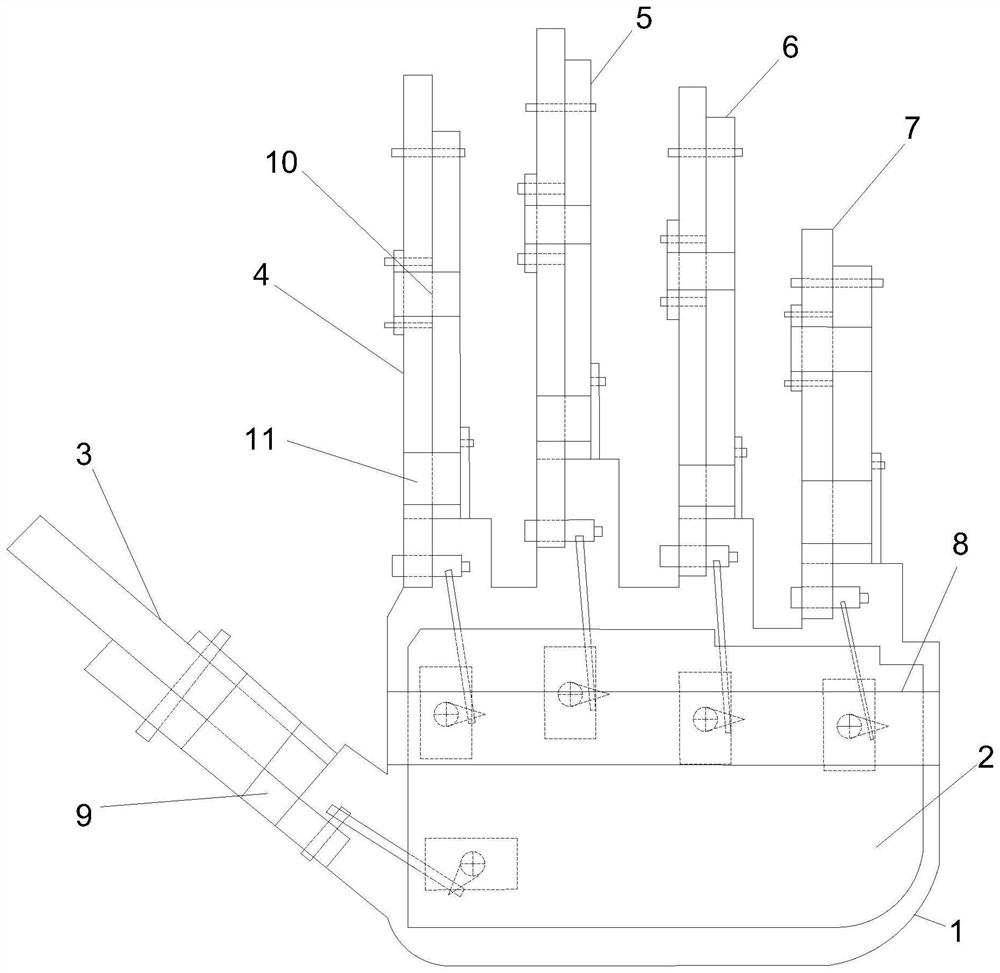
[0082] Such as figure 1 The present invention shown is a hand exoskeleton rehabilitation training device based on surface electromyography signals. Taking the right hand as an example, it includes a mechanical glove worn on the hand for driving finger movements, and a surface electromyography signal acquisition system And the drive control system (not shown in the figure) that is used to control the mechanical glove and the surface electromyography signal acquisition system;
[0083] The surface myoelectric signal acquisition system includes two myoelectric signal acquisition instruments 13 that are used to be worn at any position on the arm, and each electro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More