Sampling control method and device for flexible joint mechanical arm based on fuzzy logic
A technology of flexible joints and fuzzy logic, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of quantification of external interference suppression and complex controller design without proposed closed-loop manipulator system, to achieve improved robust performance, The effect of reducing control costs and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
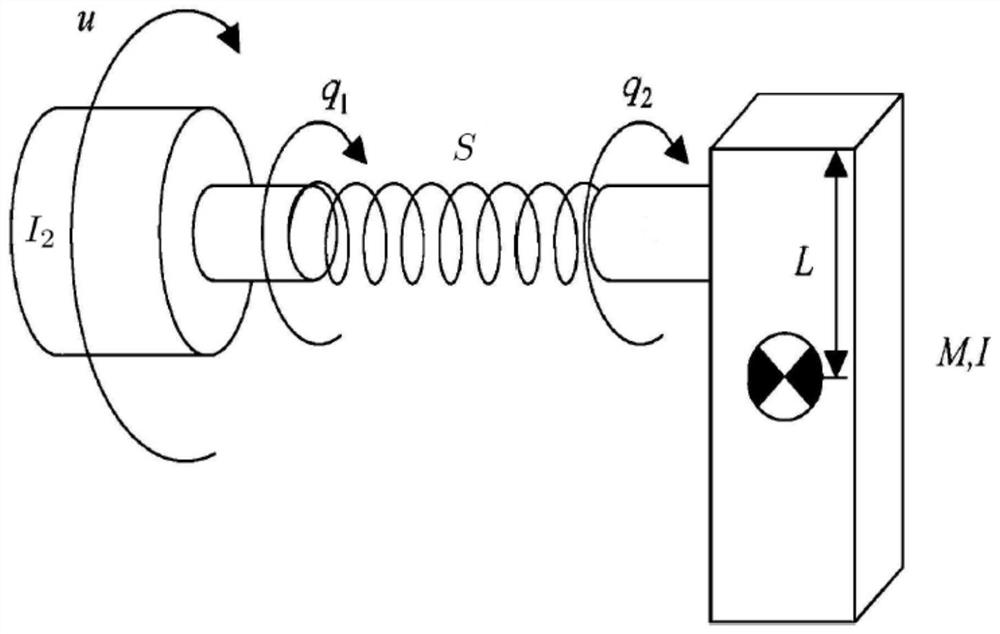
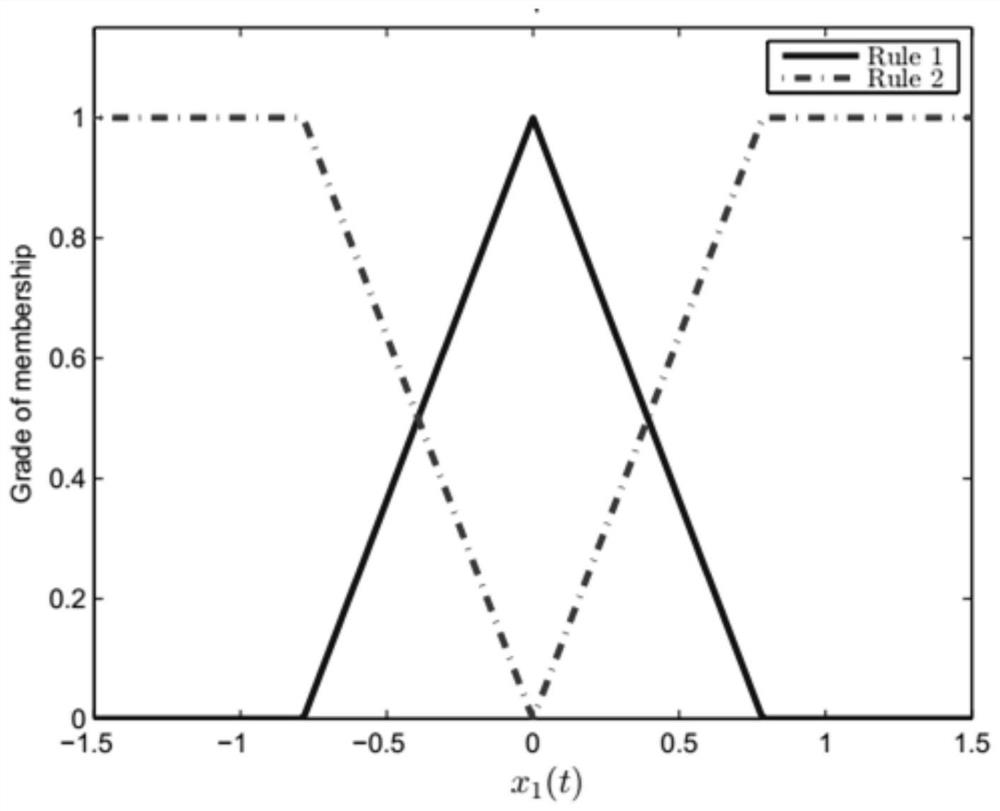
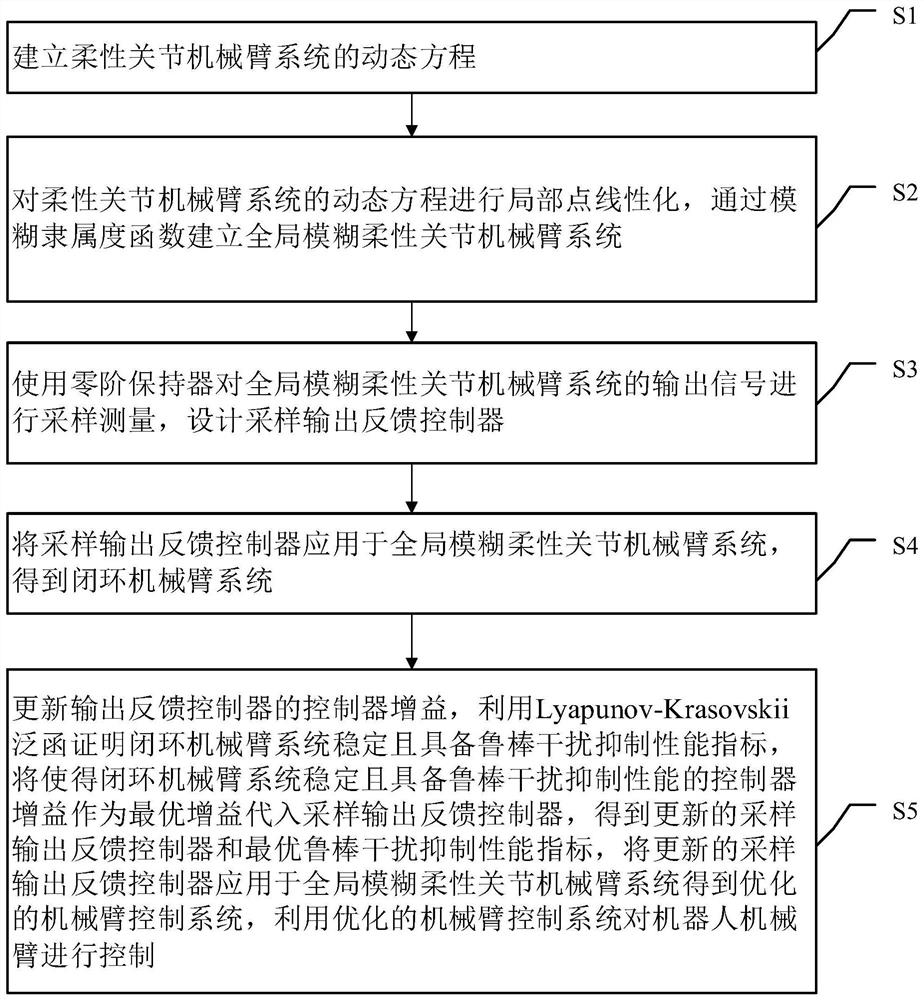
[0096] Such as Figure 1 to Figure 3 as shown, figure 1 It is a schematic diagram of the structure of the flexible joint manipulator, figure 2 is a schematic diagram of the fuzzy membership function of the flexible joint manipulator system, image 3 It is a flow chart of the present invention, a method for sampling control of a flexible joint manipulator based on fuzzy logic, the method comprising:
[0097] Step S1: Establish the dynamic equation of the flexible joint manipulator system; its dynamic characteristics can be described by the following Euler-Lagrangian dynamic equation:
[0098] by formula
[0099] Establish the dynamic equation of the flexible joint manipulator system, where, q 1 Indicates the rotation angle of the joint connecting rod of the manipulator, q 2 Indicates the angle of rotation of the motor shaft; Indicates the angular acceleration of the rotation of the joint connecting rod of the manipulator, Indicates the angular acceleration of the mo...
Embodiment 2
[0199] Corresponding to Embodiment 1 of the present invention, Embodiment 2 of the present invention also provides a fuzzy logic-based sampling control device for a flexible joint manipulator, which includes:
[0200] The dynamic equation acquisition module is used to establish the dynamic equation of the flexible joint manipulator system;
[0201] The model building module is used to perform local point linearization on the dynamic equation of the flexible joint manipulator system, and establishes the global fuzzy flexible joint manipulator system through the fuzzy membership function;
[0202] The controller building module is used to sample and measure the output signal of the global fuzzy flexible joint manipulator system by using the zero-order holder, and design a sampling output feedback controller;
[0203] The closed-loop system acquisition module is used to apply the sampling output feedback controller to the global fuzzy flexible joint manipulator system to obtain t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com