

Positioning target, visual measurement system and method for acquiring flatness
A technology of visual measurement and positioning marks, applied in the field of visual measurement, can solve problems such as low efficiency, difficult digitization, and low measurement efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] This embodiment focuses on the description of the positioning target and its active light source.
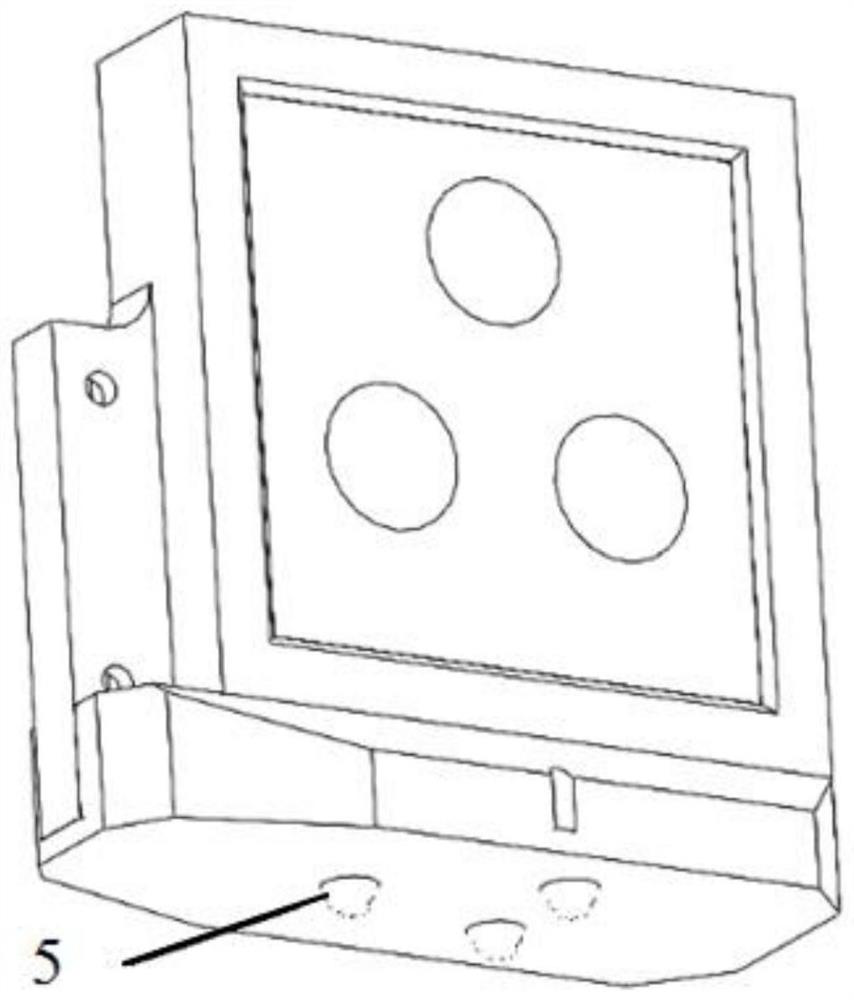
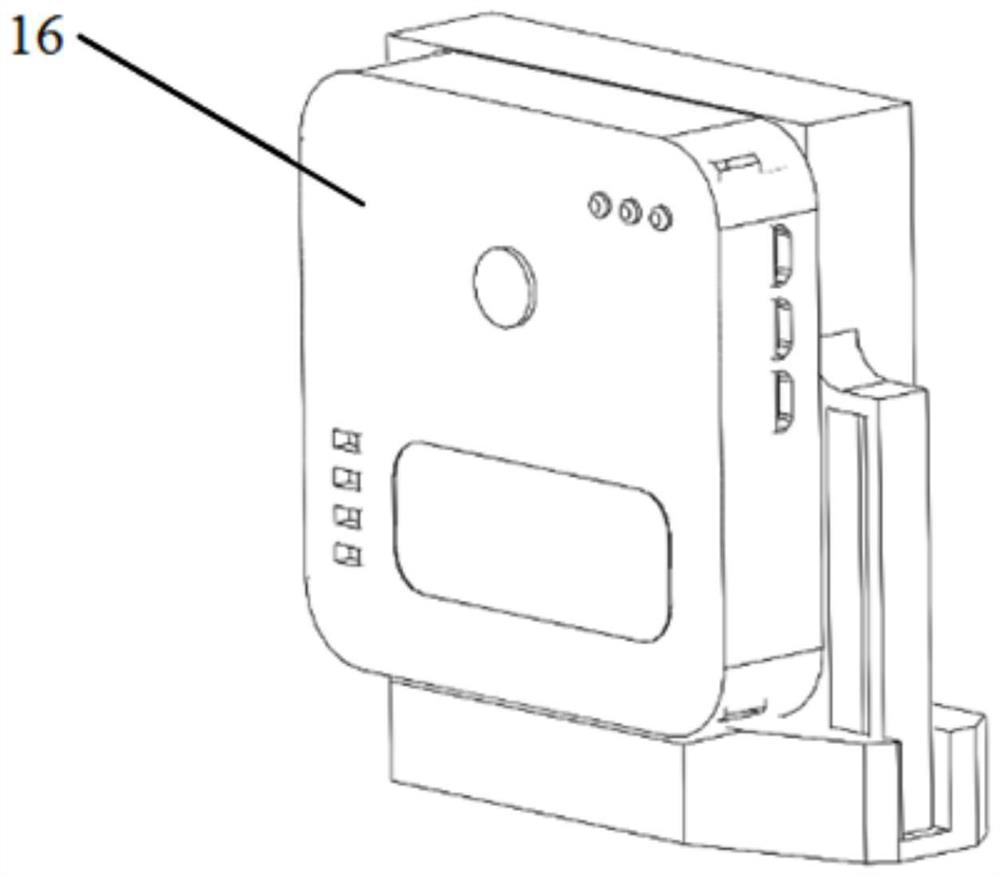
[0050] see figure 1 and figure 2 , a positioning target, including an active light source, at least three high-precision spheres 5 are arranged at the bottom of the active light source, and all the high-precision spheres 5 are not on the same straight line; the control board 16 is installed on the active light source. The measurement command is sent according to the set time; the sphericity error of the high-precision sphere 5 is less than 1um, and the diameter of the sphere is 2-10mm.
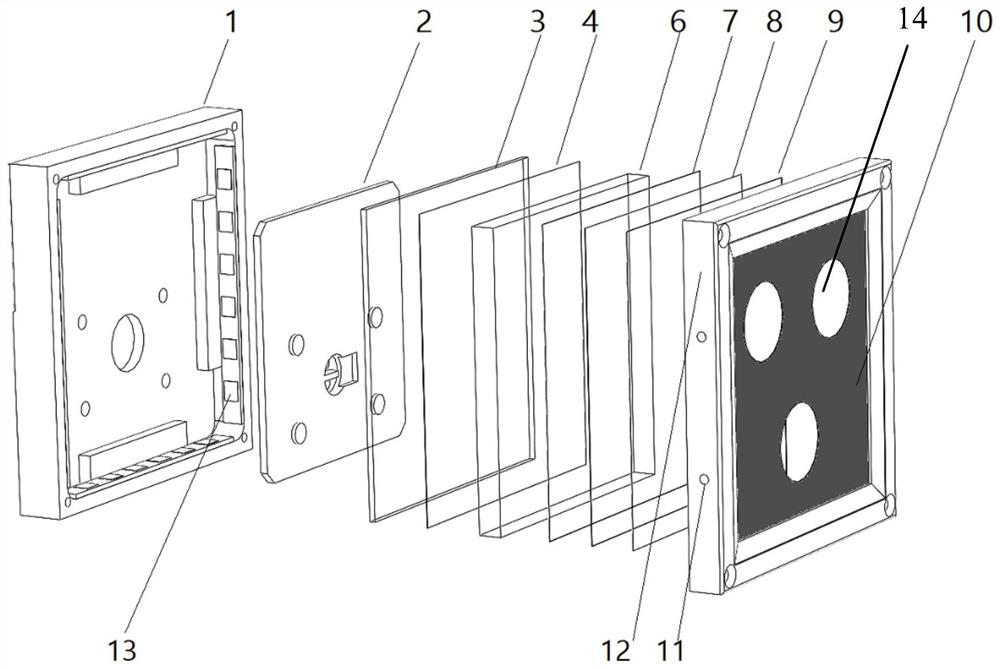
[0051] see image 3 and Figure 4 , the active light source includes a frame 1 and a light bar 13 arranged along the inner wall of the frame 1;
[0052] In the frame 1, an insulating board 2, a circuit board 3, a reflective film 4, a light guide plate 6, a light enhancement film 7, a light uniform film 8, a light shielding film 9, and a quartz glass sheet 10 are stacked in sequence, ...
Embodiment 2
[0064] see Figure 5 , a kind of visual measuring system, it comprises positioning target in embodiment 1 and is used for the camera 22 that matches with described positioning target, and camera is connected computer equipment (not shown), and described computer equipment comprises memory, processor and a program stored on a memory and operable on a processor, the processor implementing the following steps when executing the program:
[0065] Receive the measurement instruction sent by the control board 16 of the positioning target in real time, and execute capturing and recording the central coordinate P of the active light emitting light source of the positioning target; the central coordinate P of the active light emitting light source in the embodiment refers to A single center of the light part 14 or a certain geometric feature point of the geometric figure formed by the center of the circle, such as the geometric center;
[0066] Calculate the flatness of the surface co...
Embodiment 3
[0070] It should be noted that three high-precision spheres 5 that are not in the same straight line are fixed on the active light source. When the spheres are in point contact with the plane, under the force perpendicular to the plane, the surface to be tested is in contact with the three spheres respectively. , the relative positions of these three contact points remain unchanged. Assuming that the contact points between any plane S and three spheres are P1, P2, P3, and S is tangent to the three spheres at the same time, there is only one solution for P1, P2, P3. Therefore, relative to any plane S, P1, P2, P3 The distance is the same constant. Assuming that the center point of the active light source is O, since the active light source and the three high-precision spheres 5 are a rigid body, the distance h from point O to the plane S is constant. When the positioning target is on the measured plane When moving to measure different points, the distance h from point O to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More