[0004] Urban
traffic congestion is becoming more and more serious, and the number of vehicles is increasing. The driving of emergency rescue vehicles is also facing many problems: how to quickly reach the scene when an emergency occurs; how to choose the most suitable driving
route; give the rescue
route Finally, how to ensure that this
route becomes a green channel; in fact, tragedies caused by the
delay of emergency rescue vehicles caused by
traffic congestion have occurred frequently, and ensuring the priority and
safe driving of emergency rescue vehicles is an urgent problem that needs to be solved at present
By using a different set of local rules at traffic intersections, the VTL-PIC protocol can detect the presence of emergency vehicles and assign control of intersections to emergency vehicles preferentially, but this method does not take into account the
impact on the passing time of other vehicles. influences
[0007] The second is emergency rescue vehicle dispatching management and path management; the existing technology proposes a mixed
traffic flow emergency vehicle channel based on cellular automata, and by analyzing the behavior of other vehicles to avoid emergency vehicles, the rules for changing lanes are modified, and the
emergency vehicle channel Making lane changes is less disruptive than not changing lanes.
Traffic flow conditions are different when emergency vehicles are present than when emergency vehicles are not present. In moderate or high-density
traffic conditions, emergency vehicles can facilitate
emergency response. This method optimizes the driving of emergency vehicles to a certain extent; however, this method has many problems in practical application, the
overall efficiency is not high, and sometimes it even has counterproductive effects. with great difficulty
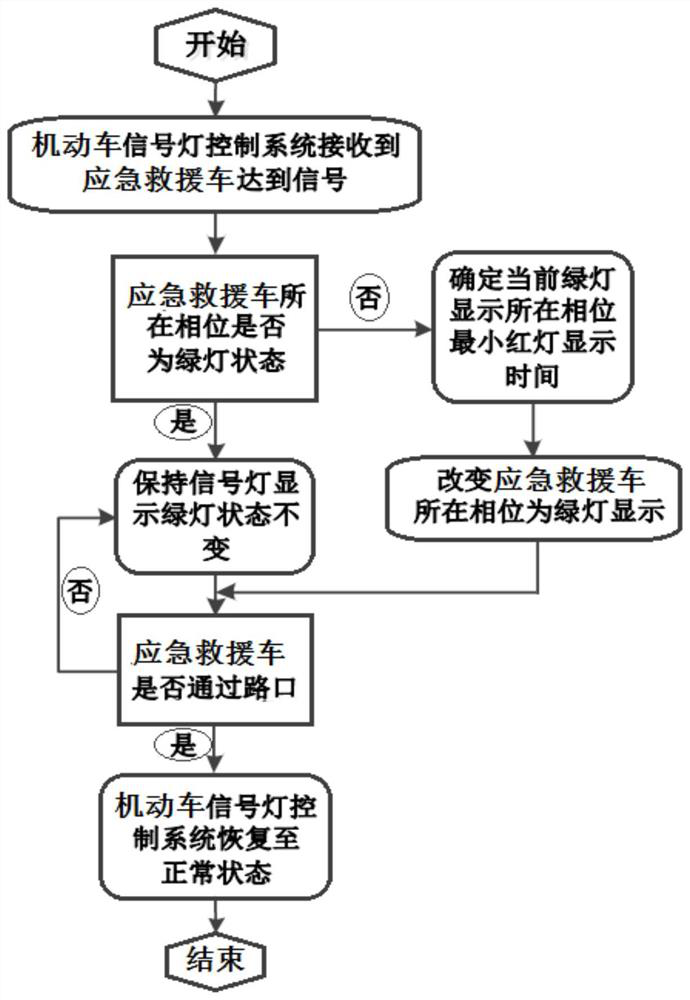
[0008] The third is the
signal light control of emergency rescue vehicles; for the
signal control of multiple emergency rescue vehicles, the prior art proposes an adaptive motor vehicle
signal light control method based on various factors such as vehicle
residence time and
traffic flow priority of each phase. Use fuzzy
Petri net to determine the
green light time of the current phase, whether to shorten the
red light time in the next direction, but the traffic light priority control strategy of emergency rescue vehicles, on the one hand, should consider the priority of emergency rescue vehicles, and on the other hand, should also consider minimizing The
impact on normal
traffic flow due to the passage of emergency rescue vehicles, but this method has a great
impact on
queue delays caused by other vehicles, and the actual application effect is very poor
[0011] First, the current traffic congestion is becoming more and more serious, and the number of vehicles is increasing. Although emergency rescue vehicles have the priority of passage given by law, in actual travel, it is difficult to guarantee the priority of emergency rescue vehicles: accidents How to quickly arrive at the scene by emergency rescue vehicles; how to choose the most suitable driving route; after the rescue route is given, how to ensure that this route becomes a green channel; in fact, the tragedy caused by the
delay of emergency rescue vehicles caused by traffic congestion Happened repeatedly, the existing technology to ensure the priority and
safe driving of emergency rescue vehicles has not been solved;
[0012] The second is that the existing technology mainly focuses on the three aspects of vehicle scheduling,
optimal route selection, and control of signal lights at traffic intersections. There is no
comprehensive planning process for emergency rescue
vehicle driving guarantee, and it does not involve the use of high-tech To achieve the purpose of avoiding other vehicles; there is no
system to form a complete
system for the
optimal route selection of emergency rescue vehicles, priority control of motor vehicle signal lights, and avoidance of other vehicles, and the time delay in the driving process of emergency rescue vehicles is still very long;
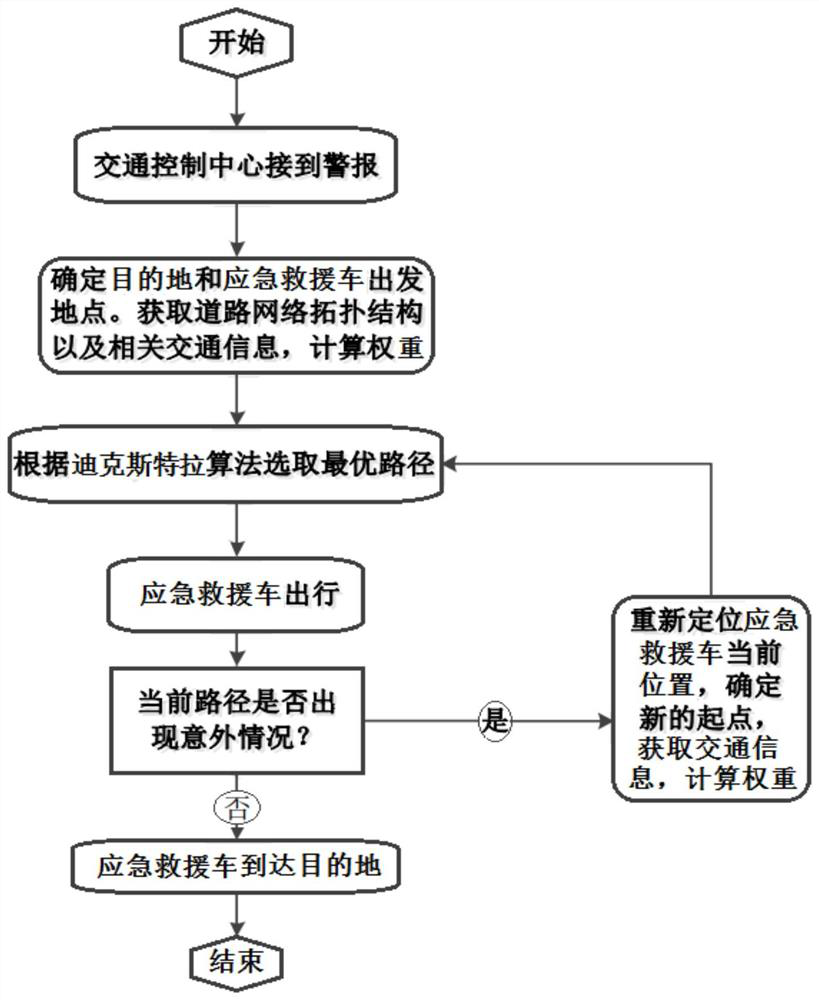
[0013] The third is that the existing technology does not have a scientific and reasonable
selection method for the optimal driving route. Generally, the length of the road is used as the main factor affecting the driving of the vehicle, and there is no driving characteristic for emergency rescue vehicles. The three factors of congestion level and emergency rescue vehicle rational
travel time are used to calculate the weight of the road. In most
traffic conditions, the shortest
travel time cannot be obtained;
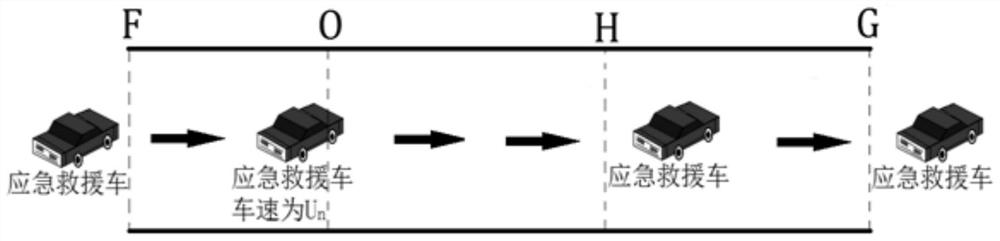
[0014] Fourth, in the actual traffic environment, due to the influence of factors such as the road environment, other vehicles, driver status, and
signal light status, the priority passage of emergency rescue vehicles often cannot be guaranteed; , it cannot reduce the time delay caused by the
signal light status being red; at the same time, when the emergency rescue vehicle is driving, it cannot implement an avoidance strategy for other vehicles on the road. Other vehicles have a great impact on the emergency rescue vehicle. Rescue vehicles spend significantly more time on the driving path, which is not conducive to their emergency tasks



 Login to View More
Login to View More  Login to View More
Login to View More