

Integral type light rack of large-wheelbase high-dynamic quadruped robot and machining process of integral light rack
A quadruped robot and processing technology, applied in metal processing equipment, motor vehicles, manufacturing tools, etc., to meet the needs of large wheelbase size span and high positioning accuracy, reduce deformation, and solve the effect of increasing control difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0060] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
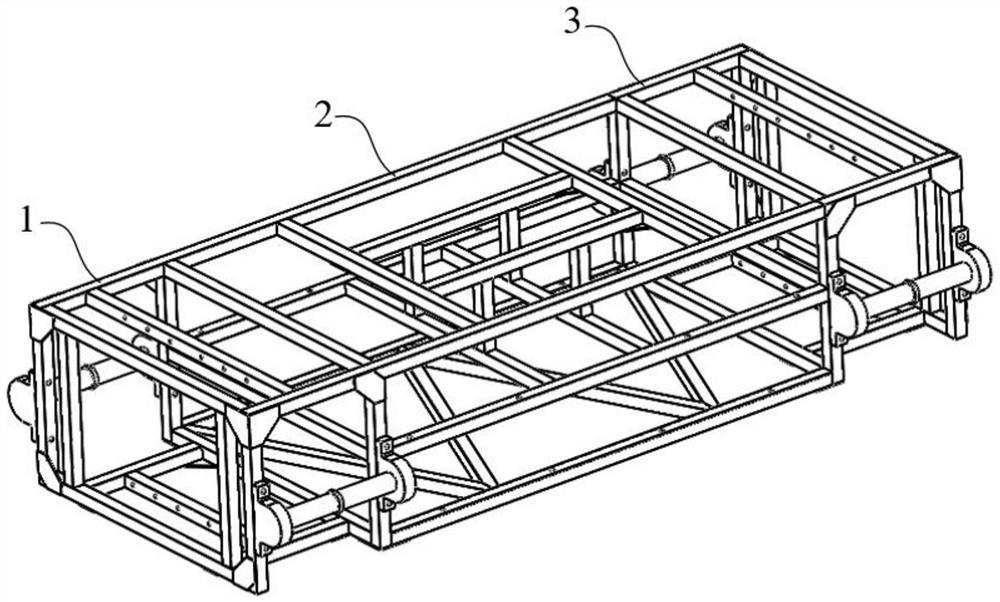
[0061] Please refer to the attached figure 1 , the present invention provides an integral lightweight frame for a large wheelbase and high dynamic quadruped robot, comprising a head 1, a torso 2, and a tail 3; the head 1, torso 2, and tail 3 are all composed of hollow rods, They are connected in turn to form a whole, and its structure is symmetrical in front and back, and basically symmetrical in left and right. Such as figure 2 As shown, the structure of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More