

Dragging teaching method based on force control robot polishing and implementation device thereof
A teaching method and robot technology, which are applied to grinding automatic control devices, program-controlled manipulators, grinding machine parts, etc., can solve the problems of difficulty in ensuring grinding accuracy and high debugging costs, and save teaching time and quantity. Few, free choice effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
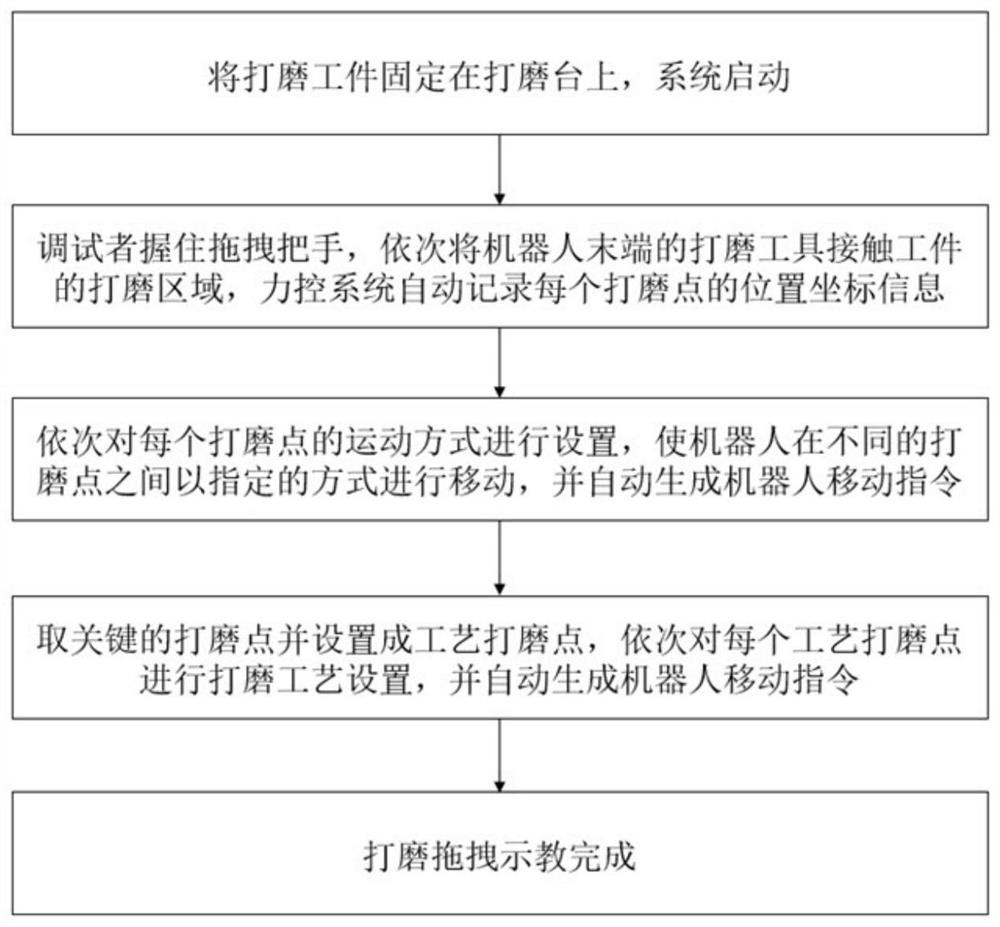
Method used
Image

Examples
Embodiment
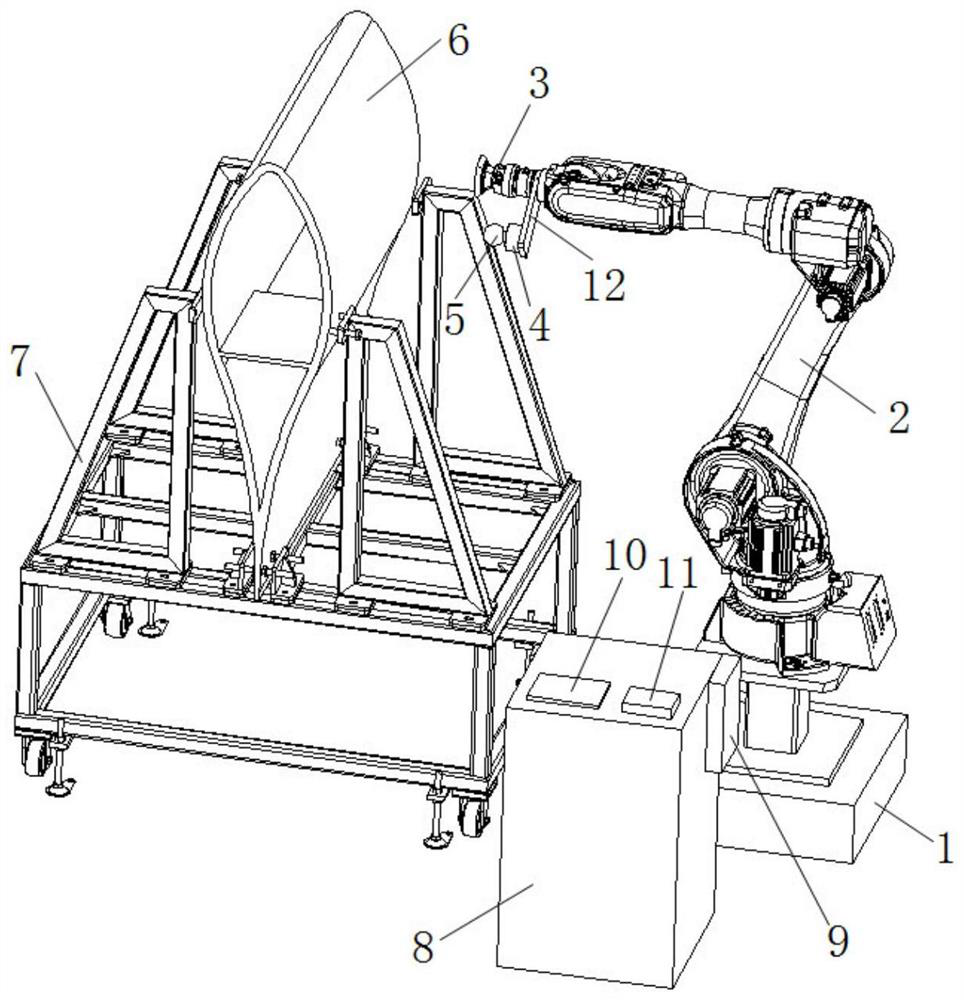
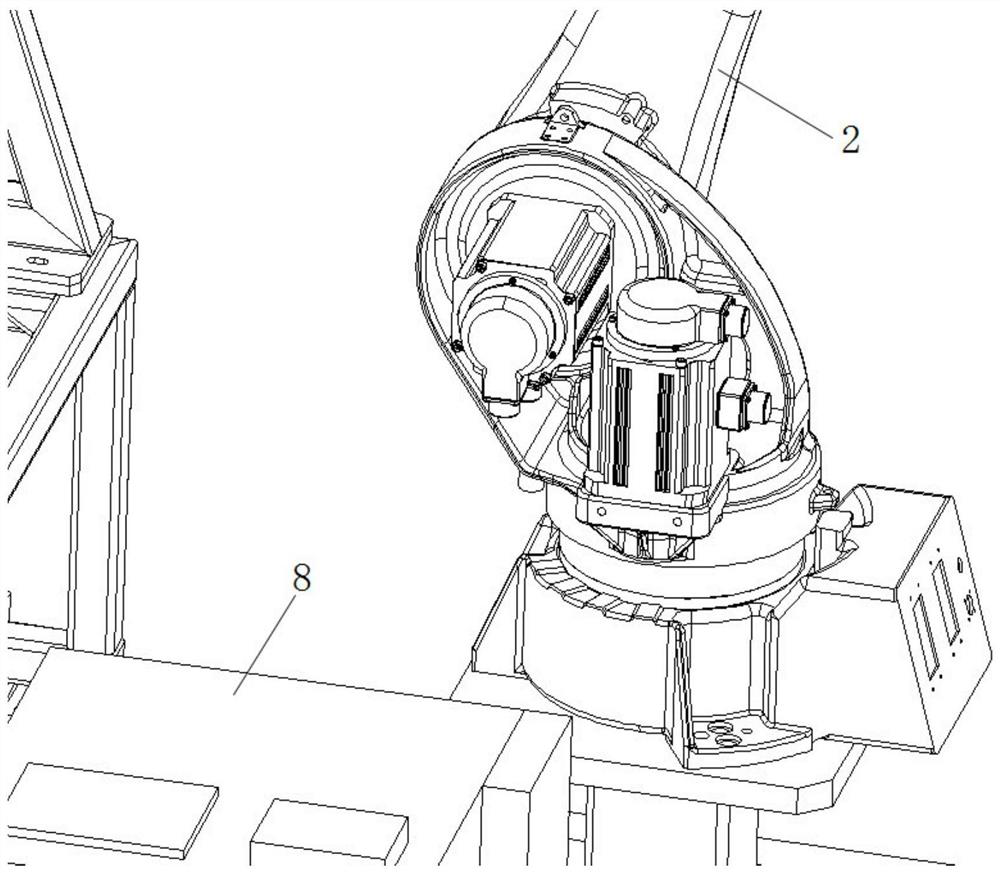
[0026] Specific examples Figure 2 to Figure 5 As shown, the implementation device of the present invention includes a robot base 1, a robot 2, an end grinding tool 3, a six-dimensional force sensor 4, a drag handle 5, a grinding workpiece 6, a grinding table 7, a robot control cabinet 8, and a robot force controller 9 , robot force control unit iPad 10, drag teaching device 11, drag bracket 12, the bottom of the robot 2 is fixed on the robot base 1, and the end grinding tool 3 is connected with the end of the robot 2; the drag bracket 12 is arranged on the bottom of the robot 2 At the end, the six-dimensional force sensor 4 is connected with the dragging handle 5 and fixed on the robot dragging bracket 12; the grinding workpiece 6 is arranged on the grinding table 7, the robot force controller 9, the robot force control unit iPad 10, the drag display The teaching devices 11 are arranged on the robot control cabinet; the robot force controller 9 is integrated with a robot forc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More