

High-precision compact integrated joint structure
A joint structure, compact technology, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the dual requirements of joint lightness and high precision, the external encoder cannot detect the backlash of the reducer transmission process, and the reducer is anti-overturning. The torque has not been enhanced and other problems, to achieve the effect of enhancing the space radiation protection capability, improving the anti-overturning moment and joint output accuracy, and improving the repeatability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
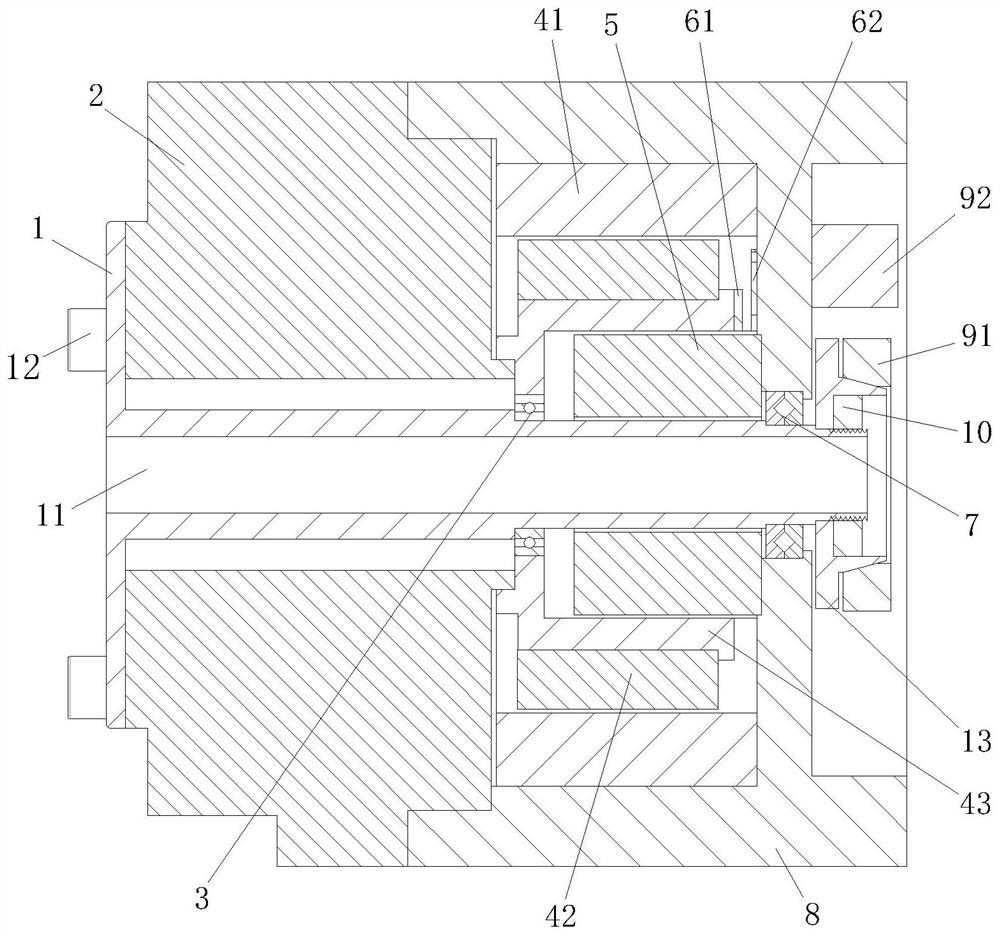
[0026] In this example, refer to figure 1 and figure 2 , the high-precision compact integrated joint structure includes a rotating shaft, a reducer 2, a motor, an integrated brake 5, a relative encoder, an absolute encoder and a joint housing 8, and the input end of the motor and the reducer 2 is assembled and fixed , the rotating shaft is assembled and fixed with the output end of the reducer 2, the joint shell 8 is connected with the reducer 2, and the motor, the integrated brake 5 and the relative encoder are covered inside; the rotating shaft is a hollow feed shaft 1, and its interior has a The middle hole 11 of the cable, the hollow feed shaft 1 runs through the reducer 2 and the joint housing 8, the deep groove ball bearing 3 is arranged between the motor and the hollow feed shaft 1, and the cross roller is arranged between the joint housing 8 and the hollow feed shaft 1 The sub-bearing 7; the absolute encoder is installed on the end of the hollow feed shaft 1 protrudi...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Hole diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More