

Monocular camera-based planar moving target visual navigation method and system
A moving target and plane motion technology, applied in the field of visual navigation, can solve the problems of not considering the relative pose of the camera's optical center, long pose estimation time, and large error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
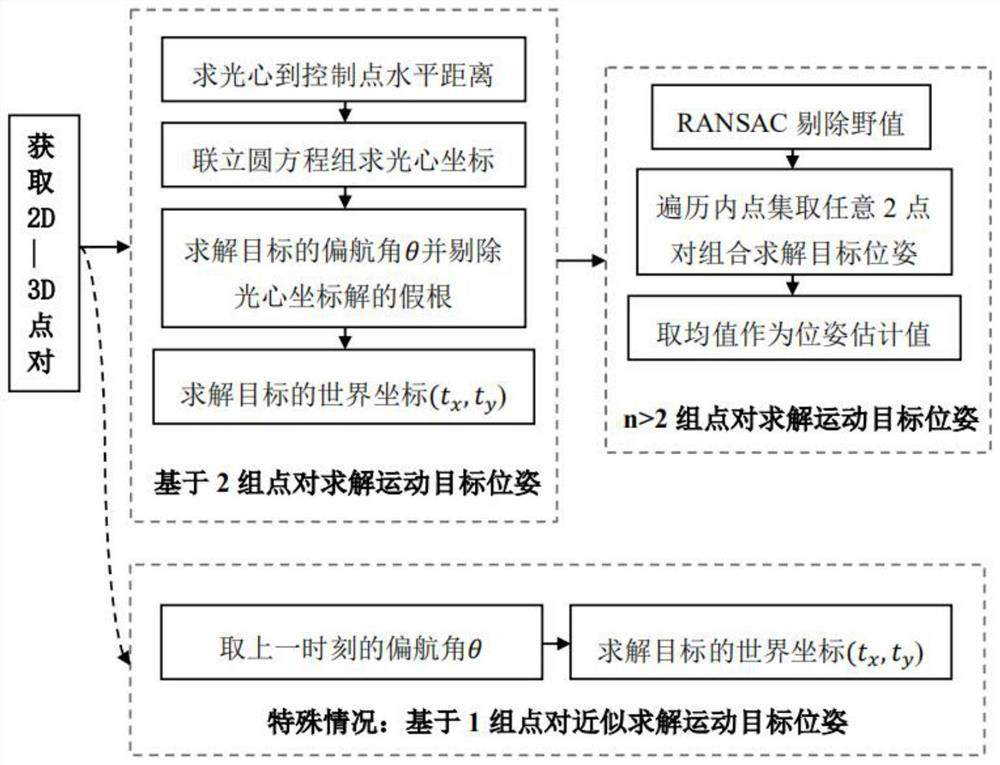
[0096] Figure 1 to Figure 4 It shows a specific embodiment of a method for visual navigation of a plane moving object based on a monocular camera in the present invention. Taking the scene of automatic transportation of wharf trucks as an example, it specifically includes the following steps:
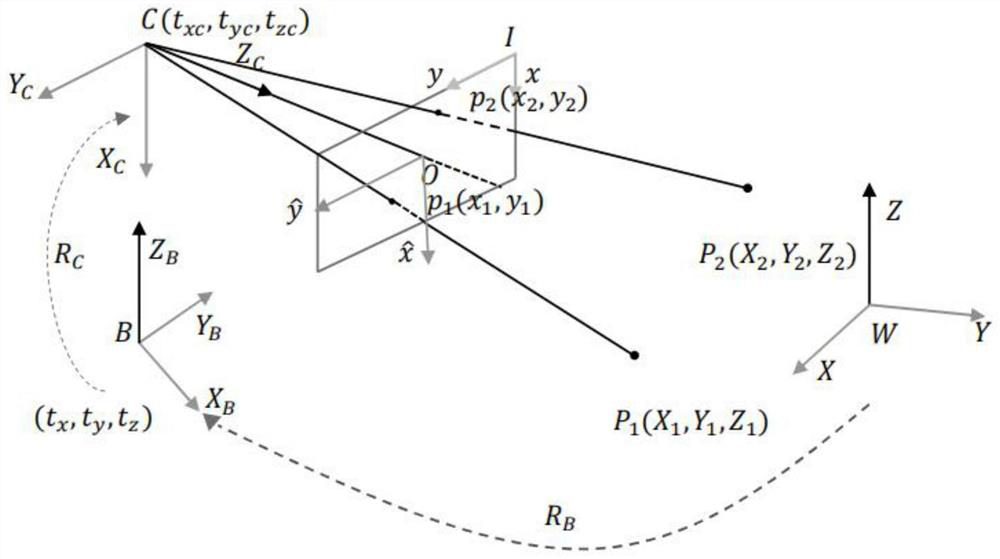
[0097] Step 1: Construct the world coordinate system W-XYZ, and the moving target coordinate system is B-X B Y B Z B , camera coordinate system C-X C Y C Z C , Image plane physical coordinate system Image pixel coordinate system I-xy, the monocular camera is installed on the moving target, the moving plane where the moving target is located is the X-Y plane, the origin B of the moving target coordinate system is the center of the moving target, and the origin B is in the world coordinate system Coordinate is t b =[t x , t y , t z ], the origin O of the physical coordinate system of the image plane is the optical axis CZ of the monocular camera C intersection with the image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More