

DDQN-based autonomous guidance maneuver decision-making method for unmanned aerial vehicle
A decision-making method, UAV technology, applied in the direction of autonomous decision-making process as a feature, neural learning method, mechanical equipment, etc., can solve problems such as over-fitting of state and action values
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
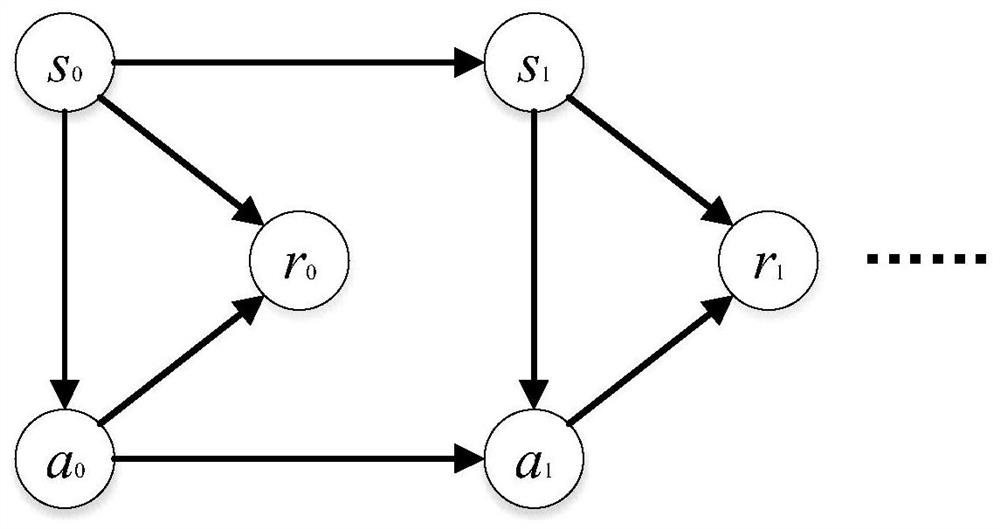
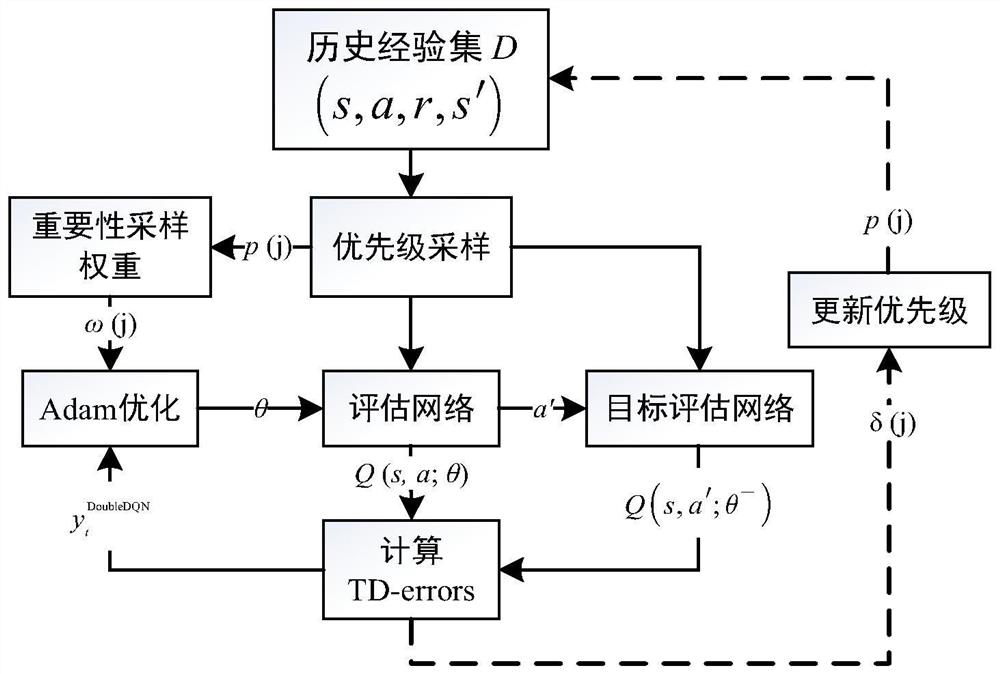
[0069] Based on artificial intelligence technology, the present invention proposes a UAV autonomous guidance maneuver decision-making method based on PER-DDQN, builds a UAV autonomous guidance maneuver decision-making model based on the Markov decision process theory, and then generates an algorithm simulation training environment, thereby according to the environment Feedback generates UAV maneuver decision-making quantity, guides and controls the flight maneuver mode of UAV. This method can improve the training efficiency of the UAV's autonomous guidance maneuver decision-making algorithm, and improve the UAV's autonomous guidance flight capability. The invention can realize autonomously guided maneuver decision-making of the UAV, and fly safely and quickly from the starting point to the ending point.
[0070] The present invention adopts following technical scheme:
[0071] 1) Establish a three-degree-of-freedom motion model for the UAV In the formula, N x , N y are th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More