

Micro underwater robot multidisciplinary optimization design method
An underwater robot and optimization design technology, applied in multi-objective optimization, design optimization/simulation, instruments, etc., can solve the problems of isolated disciplines and poor integrity, and achieve small weight, good maneuverability, calculation burden and system error reduction small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0058] A multi-disciplinary optimal design method for a miniature underwater robot, said optimal design method comprising the following steps:
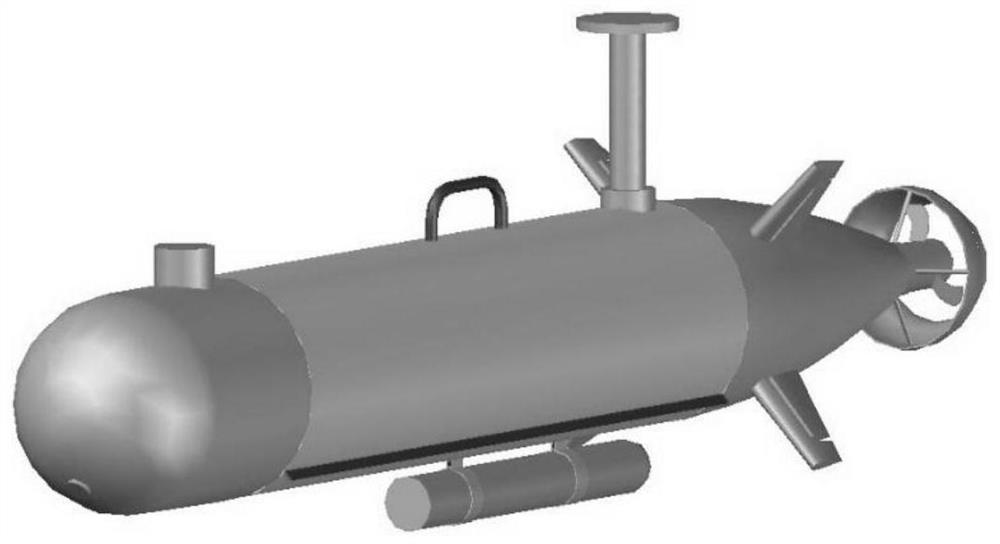
[0059] Step 1. Determine the design index and preliminary design parameters of the micro-miniature underwater robot, complete the selection of main equipment, divide the robot system into different disciplines, and establish the mathematical model of each discipline and the overall kinematic model of the robot;
[0060]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More