

Robot autonomous control method based on graph neural network reinforcement learning
A neural network and reinforcement learning technology, applied in the field of robot autonomous control based on graph neural network reinforcement learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described in detail below in conjunction with the accompanying drawings.
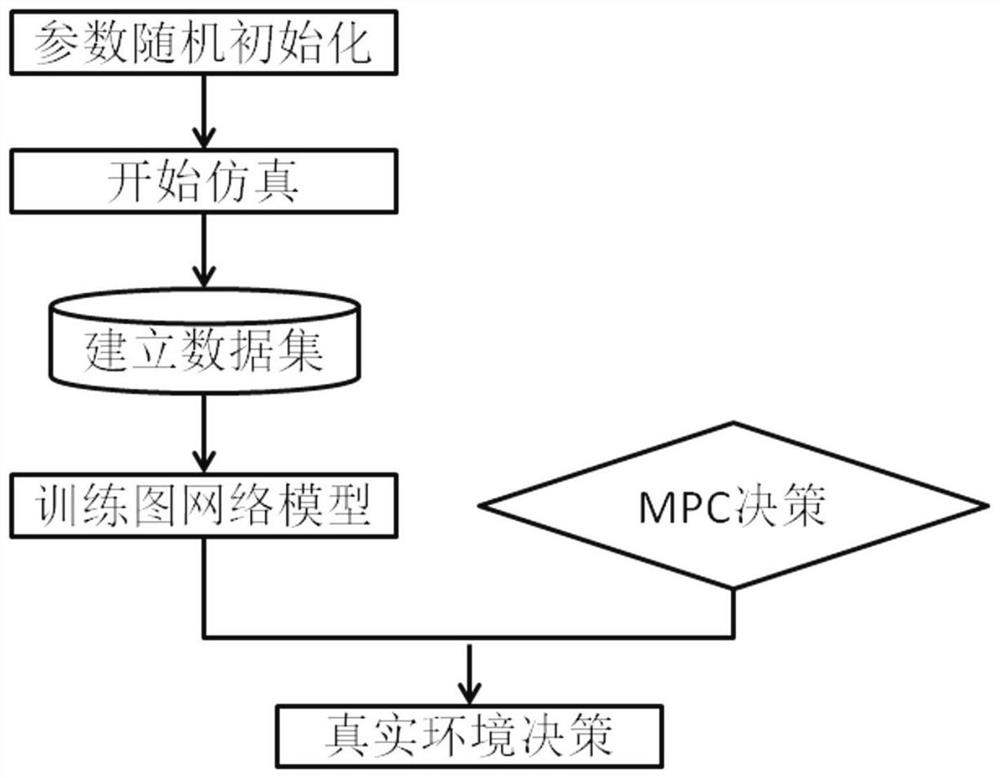
[0053] Such as figure 1 As shown, the present invention provides a robot reinforcement learning method based on a graph neural network.
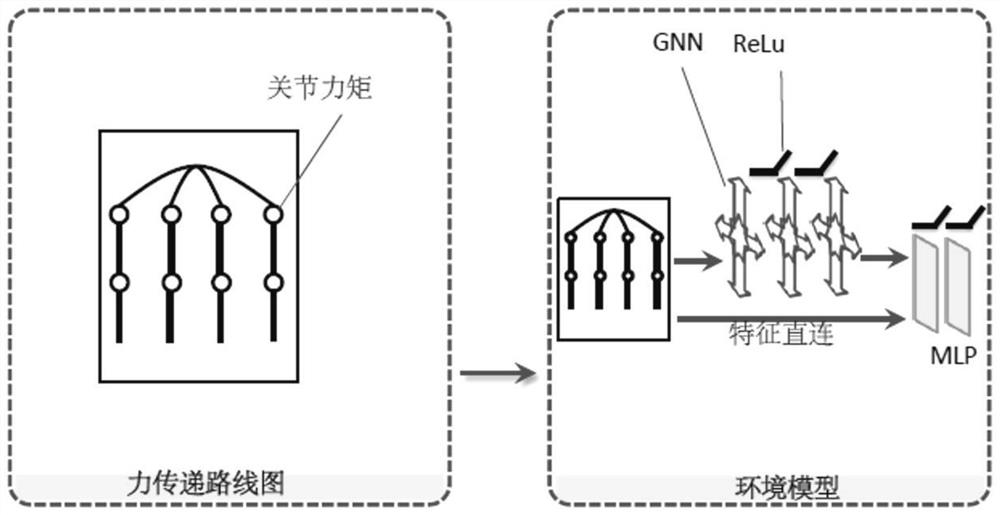
[0054] Step (1) establishes the force transmission circuit diagram according to the physical structure of the robot, and establishes a structural basis for the implementation of the subsequent diagram network establishment steps, as follows:
[0055] 1-1. In order to meet the experimental requirements, we use the Ant robot provided by OpenAI to conduct simulation experiments in the mujoco simulation environment. The Mujoco simulation environment is a simulation software that simulates and simulates the parameters of the physical world environment, and simulates the acceleration of gravity in the real physical world, the energy during the collision process, and the moment of inertia during the rotation process. The Ant rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More