

A climbing robot mechanism with compound action of tangential force and normal force
A composite action, normal force technology, applied in the field of climbing robots, can solve the problems of poor climbing reliability, high power supply dependence, poor load capacity, etc., to achieve convenient maintenance and replacement, avoid redundant structures, and reduce complexity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
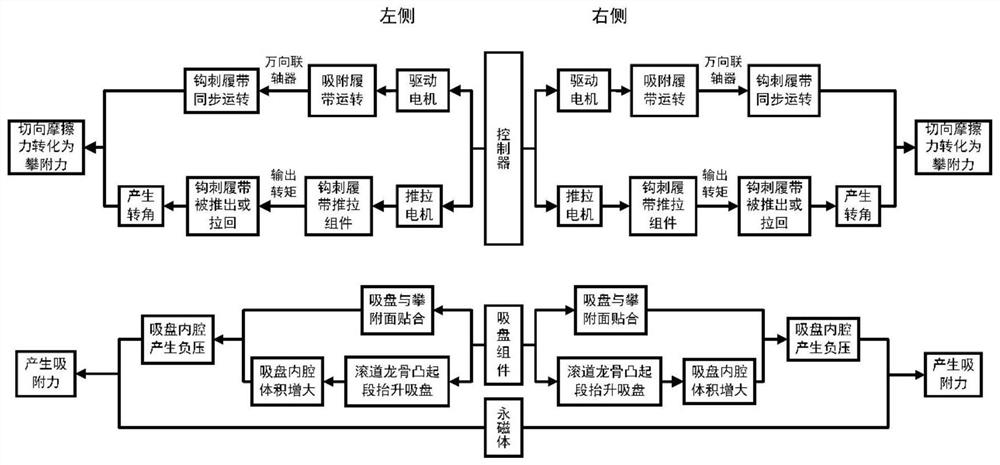
[0032] Existing climbing robots are usually developed for different application purposes, and have insufficient ability to adapt to environmental changes and cannot switch between various climbing environments. Therefore, the present invention proposes a comprehensive application of tangential force The climbing robot mechanism combined with the normal force solves the poor adaptability of the existing climbing robot to the climbing environment surface by desig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More