

A robot follow-up control system and method in a position synchronization control mode
A technology of synchronous control and robotics, applied in general control systems, control/adjustment systems, simulators, etc., can solve problems such as low safety, poor reliability, and stoppage, and achieve improved tracking speed, troublesome parameter adjustment, and easy use The effect of experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
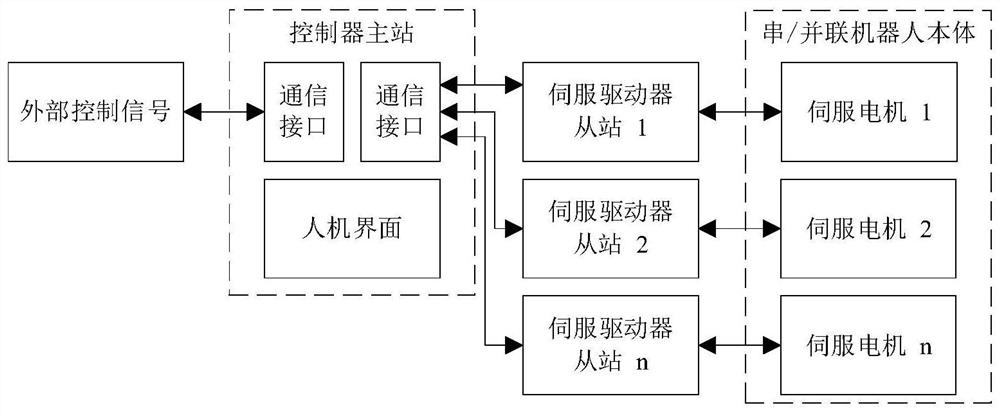
[0035] see figure 1 , a robot follow-up control system under a position synchronous control mode of the present invention, including a controller master station, a robot body and several servo driver slave stations;
[0036] The controller master station is connected to all servo driver slave stations, and the servo driver slave station is connected to the servo motor on the robot body;
[0037] The controller master station runs the robot motion control algorithm, and has a communication interface for periodic synchronous position control with the servo drive slave station, such as pulse output, field bus and industrial Ethernet bus.
[0038] In an embodiment, the controller master station has an external communication interface, such as an Ethernet interface or a serial communication interface, and through the external communication interfac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More