

Six-foot crawler-type parallel hydraulic building curtain plate mounting robot
A crawler and robot technology, applied to tracked vehicles, manipulators, motor vehicles, etc., can solve the problems of reducing the installation efficiency of prefabricated buildings, complicating the installation process, and increasing construction costs, so as to reduce the number of construction personnel and achieve high motion accuracy. The effect of reducing construction time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Next, the specific embodiments of the present invention will be further described in conjunction with the accompanying drawings:
[0058] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. However, those of ordinary skill in the art can understand that, in each implementation manner of the present invention, many technical details are provided for readers to better understand the present application. However, even without these technical details and various changes and modifications based on the following implementation modes, the technical solution claimed in this application can also be realized.
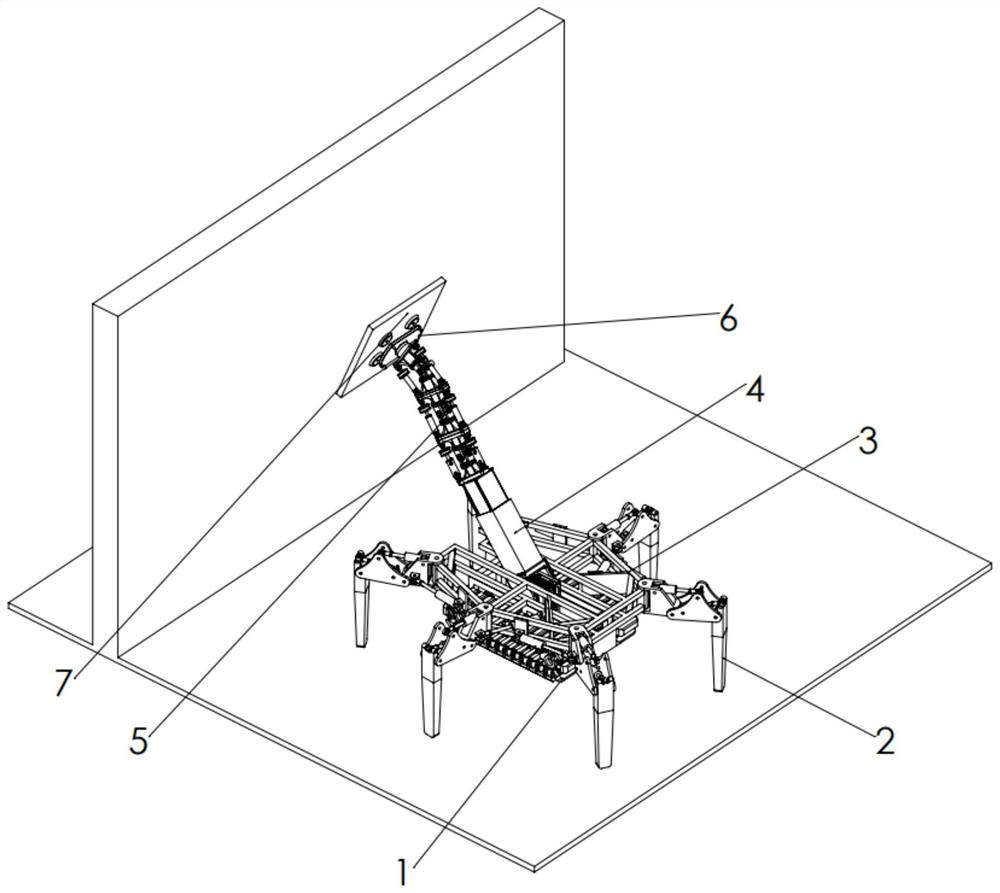
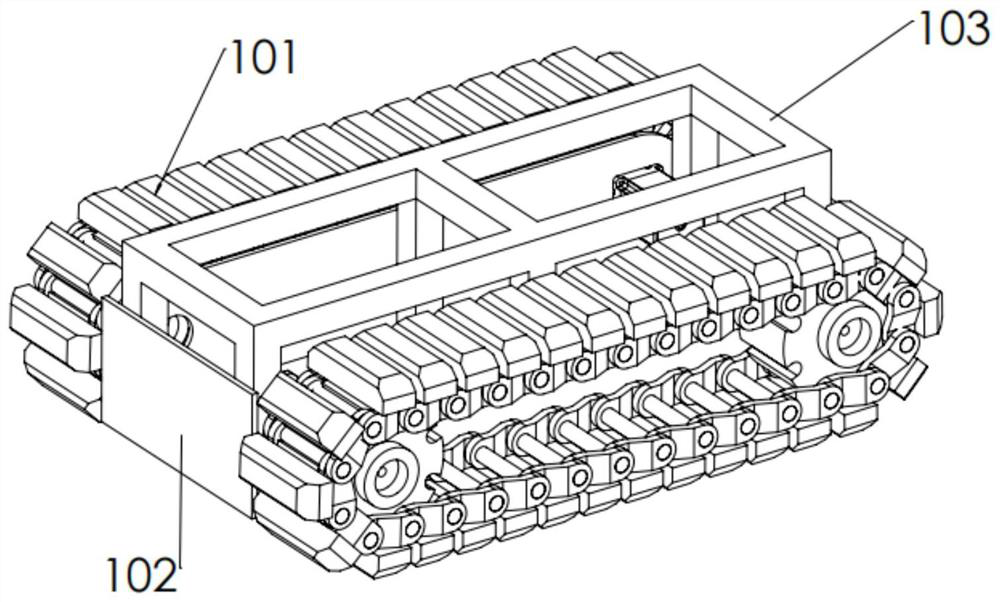
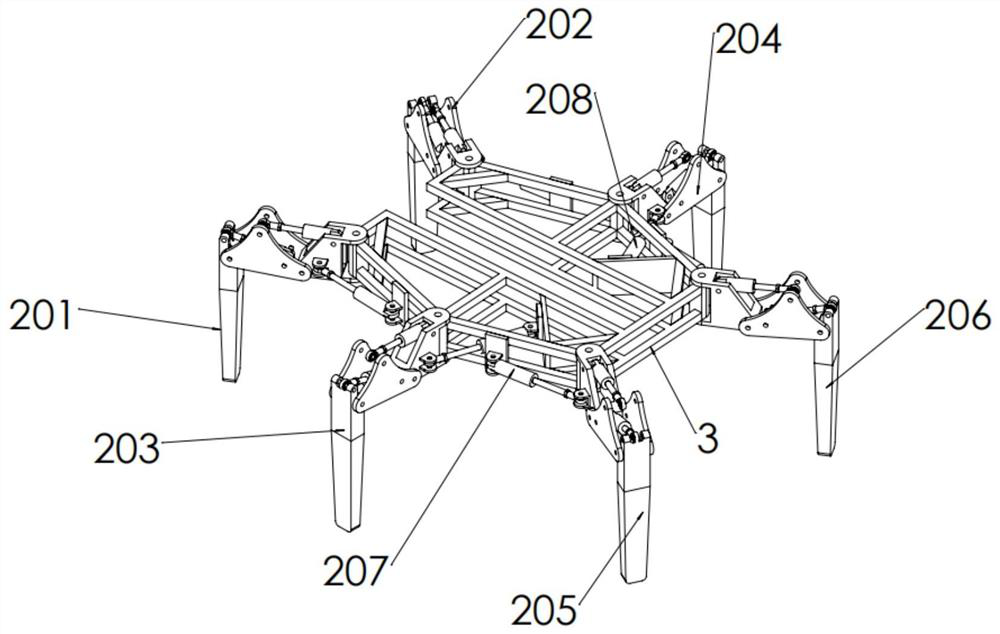
[0059] A hexapod crawler-type parallel hydraulic construction curtain panel installation robot is implemented by a crawler-type mobile platform 1, a mechanical hexapod assembly 2, a leg mounting frame 3, a mechanical arm assembly 4, a hydraulic small arm assembly 5, and a curtain panel terminal. C...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More