

Four-bar-linkage feed-screw-nut electrically-driven underwater mechanical arm gripper
An underwater manipulator, screw nut technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of small gripping force of the gripper structure, complex driving system, low applicability, etc. High precision and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
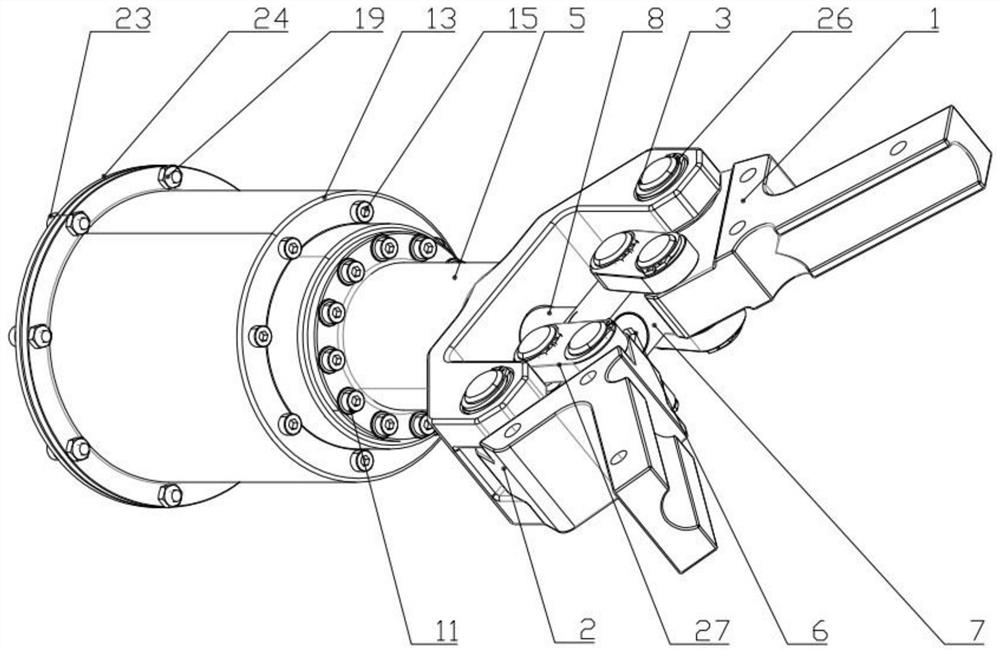
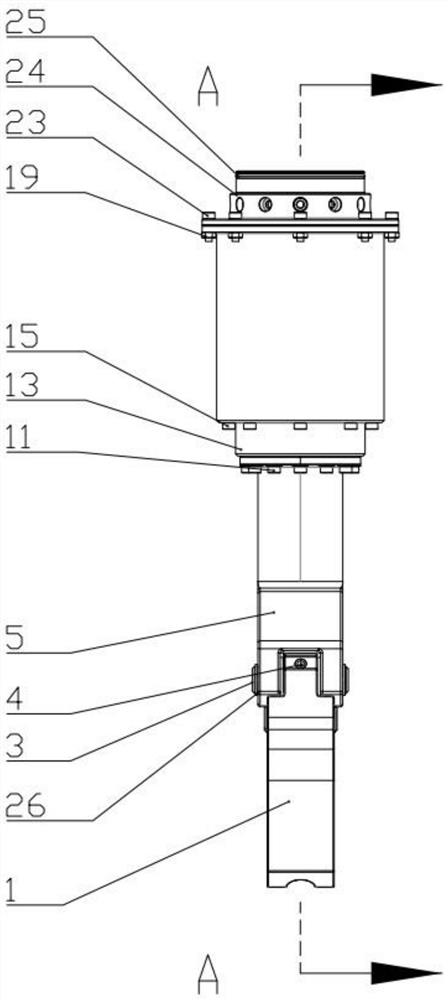
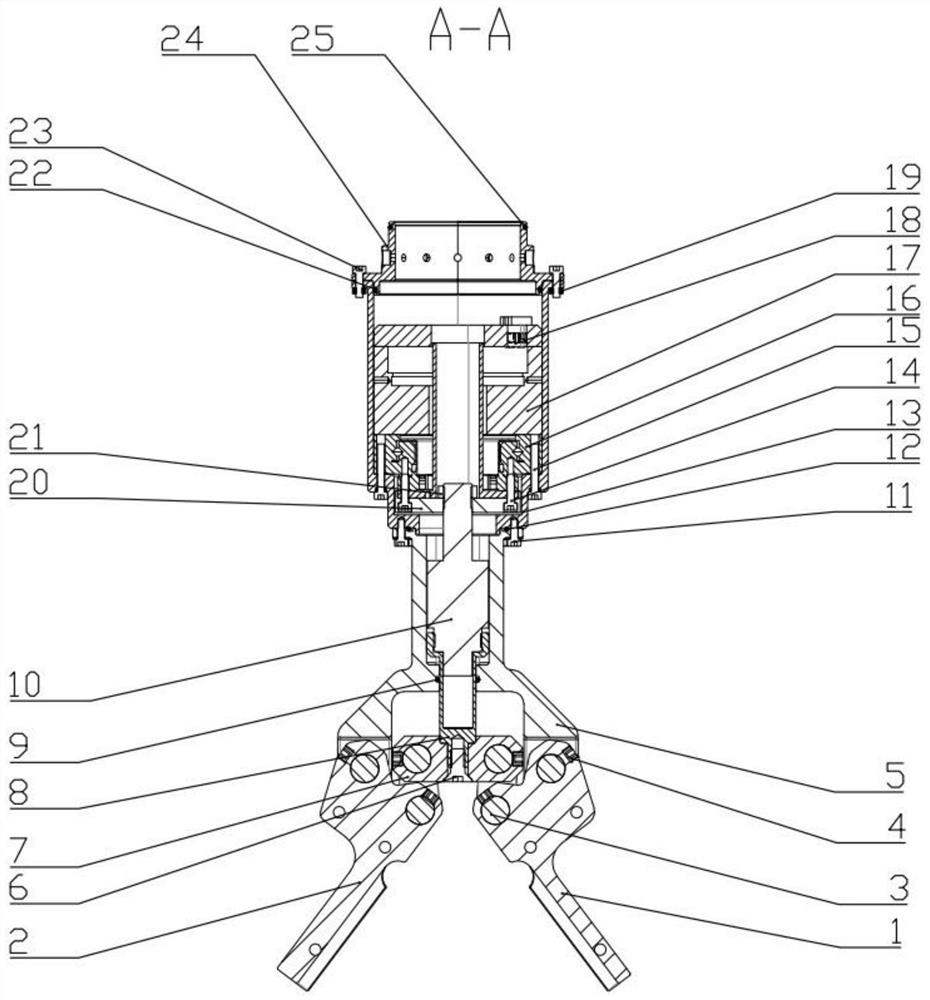
[0058] Such as Figure 1-Figure 11 As shown, a four-link screw nut electric drive type underwater manipulator gripper, including finger actuator structure components, four-link drive structure, screw nut drive components, motor drive system, seals and fasteners, etc.; The finger actuator structure assembly is composed of a first external gripper 1 and a second external gripper 2. The grippers are L-shaped, symmetrically distributed on both sides of the axis of the gripper, and are the parts that are in direct contact with the gripped object. , and the grasping surfaces of the first external clamper 1 and the second external clamper 2 are processed with semi-cylindrical grooves for grabbing T-shaped handles; the four-link driving structure is clamped by an L-shaped device, one side of jaw support 5, positioning rod end 7, square drive rod 8, and connecting rod; the motor, as a power source, transmits the rotational motion to the screw nut, and the rolling nut of the screw nut a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More