

Intelligent ship autopilot self-adaptive fuzzy output feedback control method and system
An adaptive fuzzy, output feedback technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of controller energy consumption, steering gear wear, slow ship course tracking speed, etc., to reduce energy Consumption, reduce the wear of the steering gear, improve the effect of speed and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0073] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
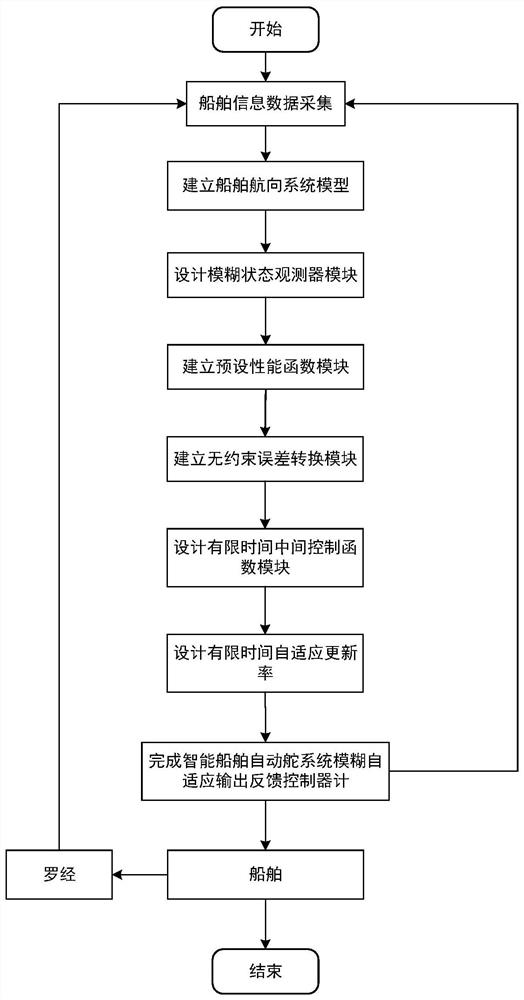
[0074] Such as figure 1 As shown, the embodiment of the present invention discloses a method for self-adaptive fuzzy output feedback control of an intelligent ship autopilot, comprising the following steps:
[0075] S1. The collected ship information is sent to the shipboard computer, and the shipboard computer considers the nonlinear charac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More