

Internal model anti-interference control method of quad-rotor unmanned aerial vehicle system
A quadrotor unmanned aerial vehicle and control method technology, applied in the direction of rotorcraft, unmanned aircraft, attitude control, etc., can solve the problems of poor robustness, low control precision, and failure to meet control requirements, etc., to achieve disturbance suppression, Enhanced Robustness Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further described in conjunction with the accompanying drawings.
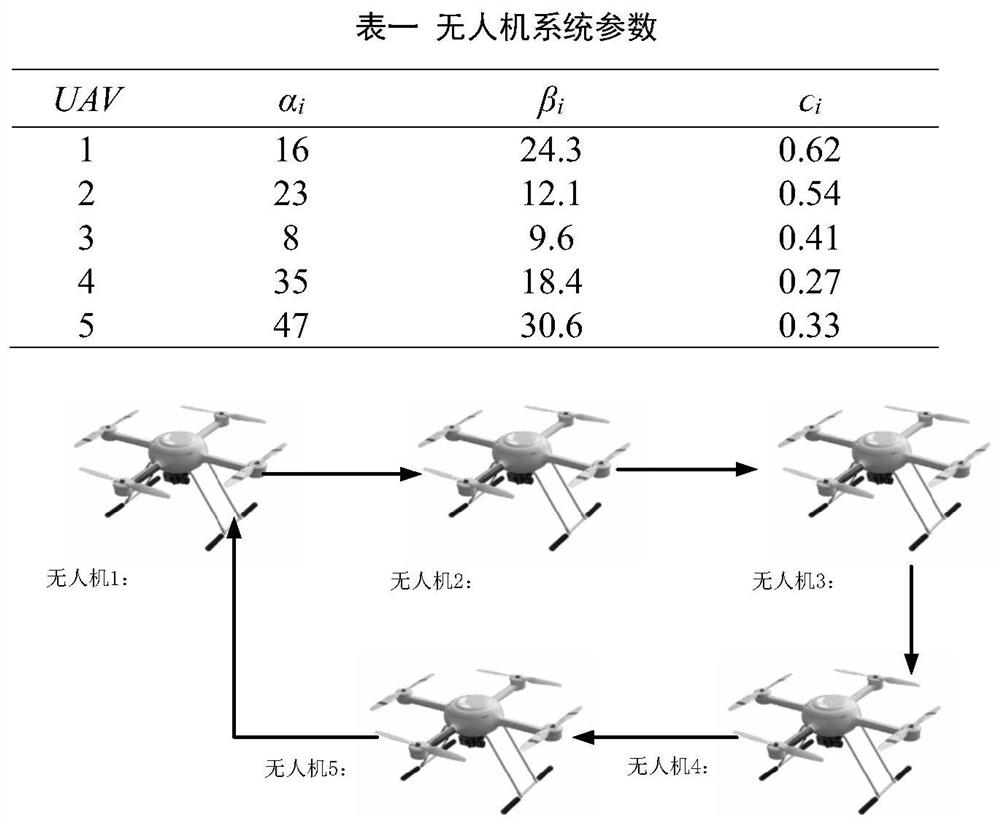
[0063] Combined with Table 1, figure 1 — Figure 4 , an internal model anti-disturbance control method for a quadrotor unmanned aerial vehicle system, comprising the following steps:
[0064] Step 1, transformation matrix R from the body coordinate system (B system) to the inertial coordinate system (E system) BE for:
[0065]
[0066] where ξ=[x,y,z] T , η=[φ,θ,ψ] T Indicates the position and direction of the quadrotor UAV, φ, θ, ψ respectively represent the roll angle, pitch angle and yaw angle of the UAV; the coordinate system E system (E, X E ,Y E ,Z E ) represents the inertial coordinate system, the coordinate system B system (B,X B ,Y B ,Z B ) is the body coordinate system.
[0067] Step 2, before establishing the mathematical model, assuming that the quadrotor UAV is a rigid body, the origin of the body coordinate system coincides with the center of mass...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More