

Sorting method for guiding mechanical arm to grab materials with different poses based on ConvPoint model
A technology of manipulator and pose, which is applied in the sorting field based on the ConvPoint model to guide the manipulator to grab materials in different poses. Line and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below.
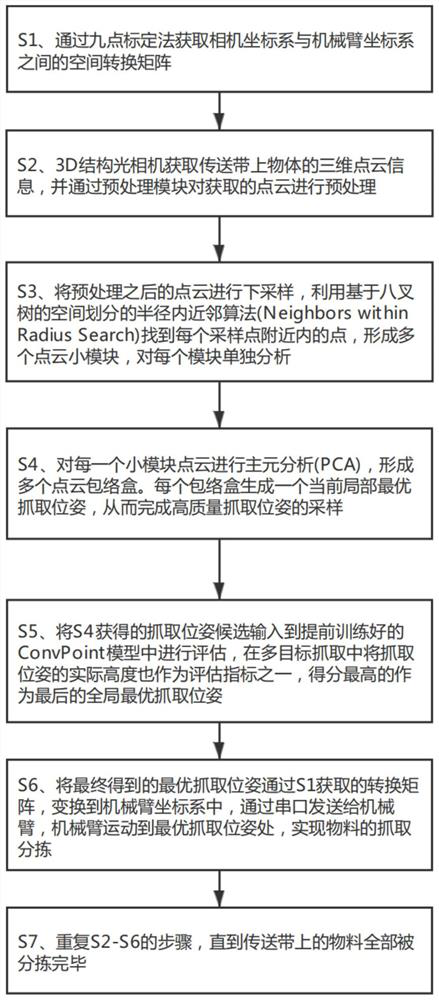
[0043] As shown in the figure, the sorting system used in the present invention includes a 3D structured light camera, a mechanical arm and a computer. The 3D structured light camera is used to take images of materials on the conveyor belt of the flexible production line and feed them back to the computer. The computer is used to process the images taken. After processing, control the robotic arm to sort different materials on the conveyor belt of the flexible production line. The specific steps are:
[0044] S1. Obtain the space transformation matrix between the camera coordinate system and the manipulator coordinate system through the nine-point calibration method, specifically:
[0045] First, the end fixture of the mechanical arm is controlled by the teaching pendant to move to 9 points on the calibration board to obtain the coordinates in the robot coordinate system. At the same time, the 3D structured light ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More