

Heterogenous data fusion method and device, and storage medium
A data fusion and data technology, applied in the field of image processing, can solve problems such as data invalidity, noise, holes, etc., and achieve the effects of reducing the amount of calculation, improving execution efficiency, and satisfying adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
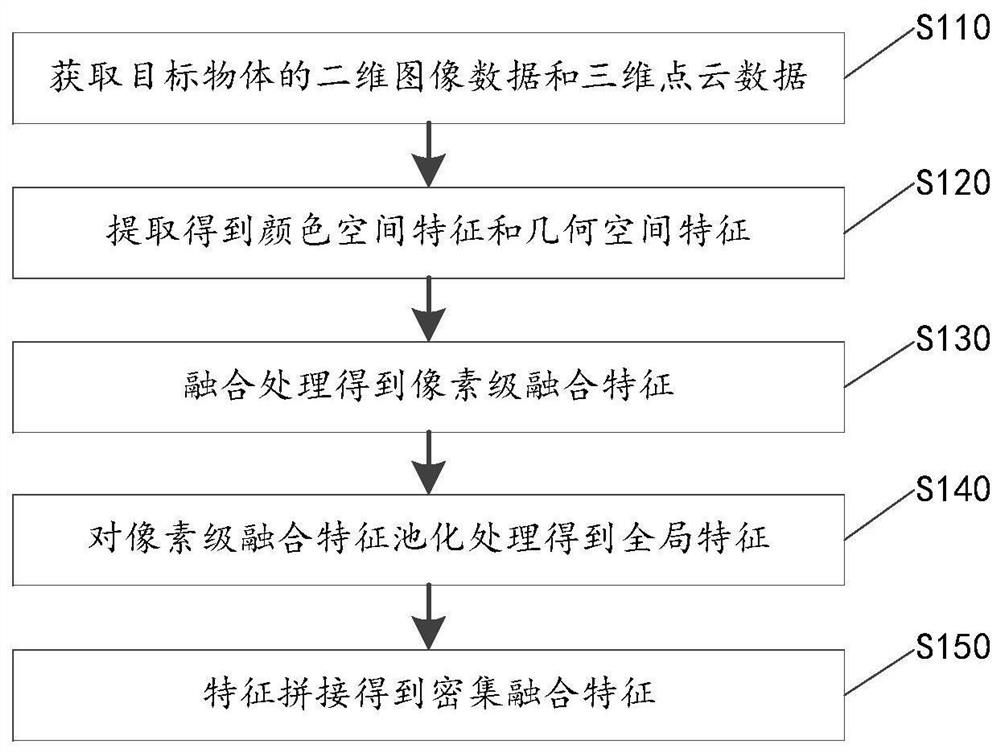
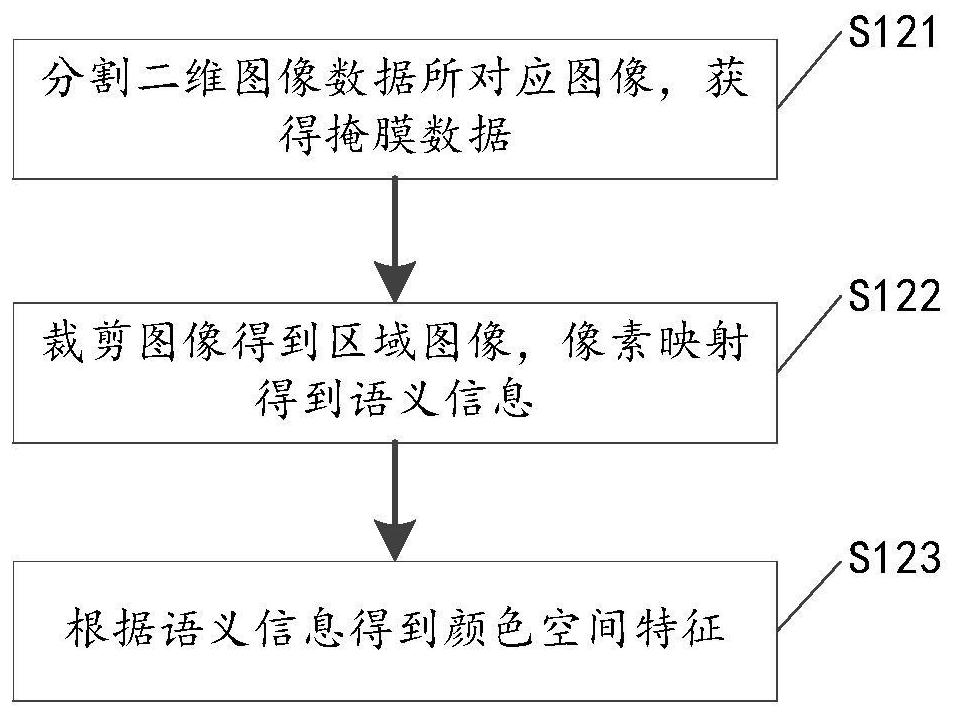
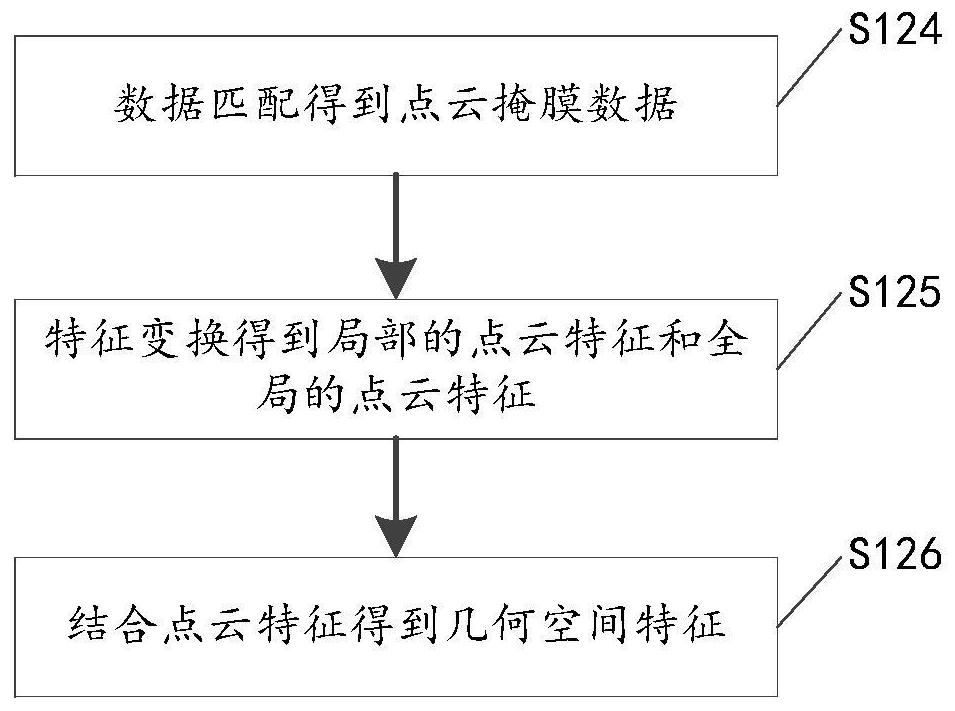
[0038] Please refer to figure 1 , the present application discloses a heterogeneous data fusion method, which includes steps S110-S150, which will be described respectively below.
[0039] Step S110, acquiring 2D image data and 3D point cloud data of the target object.
[0040] It should be noted that the target object here may be a product on an industrial assembly line, a mechanical part in an object box, a tool on an operating table, and the like. Then, the two-dimensional image of the target object can be collected by optical imaging components such as cameras and video cameras and generate two-dimensional image data; and the target object can be obtained by such as contact or non-contact scanning equipment (such as laser scanning equipment) 3D point cloud data, and even use 3D mapping software to export the 3D point cloud data of the target object. The 3D point cloud data here can be a part of the appearance shape data of the target object surface.
[0041] In a specifi...
Embodiment 2
[0090] On the basis of the heterogeneous data fusion method disclosed in Embodiment 1, this application also discloses a feature detection device of a target object. For details, please refer to Figure 7 , the feature detection device 2 mainly includes a sensor 21 and a processing unit 22, which will be described separately below.
[0091] The sensor 21 is used to collect two-dimensional images of the target object to form two-dimensional image data, and collect three-dimensional images of the target object to form three-dimensional point cloud data. The sensor 21 may be a camera with 2D and 3D acquisition functions, so the sensor 21 may be used to acquire a two-dimensional image of the target object, or the sensor 21 may be used to acquire a three-dimensional point cloud of the target object. For example, a 3D camera using RGB-D data is used to collect relevant data, and output a color image and a depth image at the same time. At this time, the RGB image and the Depth image ...
Embodiment 3
[0109] On the basis of the heterogeneous data fusion method disclosed in Embodiment 1, this application also discloses a feature detection device of a target object. For details, please refer to Figure 8 , which mainly includes a memory 31 and a processor 32, which will be described separately below.
[0110] The memory 31 is used as a computer-readable storage medium for storing programs, and the programs may be program codes corresponding to the heterologous data fusion methods S110-S150 in Embodiment 1.
[0111] Of course, the memory 32 can also store some network weight parameters, network training process data, image detection process data, 2D image data, 3D point cloud data, training sample data, feature point detection results and other data.
[0112] The processor 32 is connected to the memory 31, and is used to execute the program stored in the memory 31 to realize the corresponding method. The functions implemented by the processor 31 can refer to the processing un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More